
پیشرانهای فشار بالا وسایل اساسی برای کنترل سرعت موتورهای متناوب هستند و در صنایعی مانند بلندکردن، متالورژی، نفت و تولید برق به طور گستردهای برای تنظیم سرعت موتورهای با قدرت و فشار بالا استفاده میشوند. با این حال، پیشرانهای فشار بالای ۶kV غالباً در حین عملیات به دلیل عواملی مانند نوسان شبکه و تأثیر بار، با خطاهای راهاندازی غیرطبیعی مواجه میشوند که به طور قابل توجهی امنیت و قابلیت اطمینان سیستمهای کنترل سرعت موتور را تحت تأثیر قرار میدهد.
برای تضمین عملکرد پایدار سیستمهای پیشران فرکانس متغیر (VFD) فشار بالا، بهبود کارایی صنعتی و کاهش مصرف انرژی، دولت سری از سیاستها را برای تشویق تحقیقات و کاربردهای فناوری پیشران فشار بالا معرفی کرده است. بنابراین، تحلیل عمیق دلایل خطاهای راهاندازی غیرطبیعی پیشرانهای فشار بالای ۶kV و توسعه اقدامات پیشگیرانه مؤثر برای پیشرفت فناوری VFD فشار بالا و حفظ رشد اقتصادی صنعتی اهمیت زیادی دارد.
۱ مروری بر پیشرانهای فشار بالای ۶kV
پیشران فشار بالای ۶kV یک دستگاه الکترونیک قدرت با قدرت بالا است که از IGBTها به عنوان المانهای سوئیچینگ استفاده میکند و از توپولوژی چندسطحی برای کنترل سرعت متغیر فرکانس در فشار ۶kV و بالاتر استفاده میکند. واحدهای قدرت آن معمولاً از مدارهای سهسطحی با نقطه میانی خنثی (3L-NPC) یا پنجسطحی با نقطه میانی خنثی فعال (5L-ANPC) تشکیل شدهاند که از ترکیب زیرمدولهای متعدد ساخته شدهاند. هر زیرمدول شامل ۶-۲۴ IGBT و دیودهای فریویلینگ است که موجنمایی پلهای با ۹-۱۷ سطح ایجاد میکند که پس از فیلتر کردن به موج سینوسی تقریبی تبدیل میشود.
ظرفیت معمولی از ۳۰۰۰ تا ۱۴۰۰۰ kVA متغیر است، با سطوح ولتاژی که شامل ۶kV، ۱۰kV و ۳۵kV میشود. برای نیازهای ظرفیت و ولتاژ بالاتر، میتوان از توپولوژی مبدل چندسطحی ماژولی (MMC) استفاده کرد که در آن زیرمدولها از ساختارهای نیمهپل یا پل کامل استفاده میکنند، با صدها زیرمدول در هر فاز، که امکان دسترسی به سطوح ولتاژ تا ۲۲۰kV و ظرفیت واحد تا ۴۰۰ MVA را فراهم میکند. این مناسب برای کاربردهایی مانند یکپارچهسازی شبکه انرژیهای تجدیدپذیر، بادآبی دریایی و انتقال مستقیم جریانهای انعطافپذیر است. استراتژی کنترل پیشرانهای فشار بالا پیچیده است و شامل فناوریهای کلیدی مانند مدولاسیون فازیسازی حمله، تعادل جریان، تشخیص بدون سنسور و بهینهسازی ضعیفسازی میدان است.
۲ خطاهای راهاندازی غیرطبیعی پیشرانهای فشار بالای ۶kV
در حین عملیات، پیشرانهای فشار بالای ۶kV به دلیل ناهماهنگیهایی مانند جریان بیش از حد، ولتاژ بیش از حد و گرم شدن بیش از حد معمولاً راهاندازی غیرطبیعی میشوند. خطاهای جریان بیش از حد معمولاً در حین راهاندازی یا تغییرات ناگهانی بار رخ میدهند که جریان لحظهای ممکن است ۲-۳ برابر مقدار اسمی را تجاوز کند. اگر جریان بیش از ۱۶۰۰A برای بیش از ۱۰۰ms یا ۲۰۰۰A برای بیش از ۱۰ms باشد، پیشران فوراً IGBTها را مسدود میکند و کنتکتور خروجی را قطع میکند و راهاندازی محافظت سختافزاری را فعال میکند.
خطاهای ولتاژ بیش از حد معمولاً به دلیل نوسان شبکه یا تغییرات ناگهانی بار ایجاد میشوند. وقتی ولتاژ دیسی بیش از ۱.۲ برابر مقدار اسمی (۱۳۶۸V) شود، محافظت نرمافزاری ولتاژ بیش از حد فعال میشود؛ اگر بیش از ۱.۳۵ برابر (۱۰۲۶V) شود، محافظت سختافزاری مستقیماً راهاندازی میکند. خطاهای گرم شدن بیش از حد معمولاً در محیطهای دمای بالا یا در حین عملیات بار بیش از حد طولانی مدت رخ میدهند. وقتی دمای IGBT بیش از ۹۰°سیلیزیوم یا دمای رادیاتور بیش از ۷۰°سیلیزیوم برای بیش از ۵ دقیقه باشد، سیستم هشدار دمای بالا صادر میکند؛ اگر دما به ۱۰۰°سیلیزیوم یا ۸۰°سیلیزیوم برسد، راهاندازی مستقیم صورت میگیرد. ویژگی مشترک این سه نوع خطا فعال شدن مکانیسم محافظت خودکار پیشران است که با مسدود کردن IGBTها و قطع کنتکتورها خروجی را به سرعت قطع میکند و نتیجه آن پدیدههایی مانند توقف اضطراری موتور و هشدارهای خطا میشود.
۳ اقدامات پیشگیرانه
۳.۱ مقاومت محدودکننده جریان
برای حل خطاهای جریان بیش از حد، یک مقاومت محدودکننده جریان میتواند بین خروجی پیشران و موتور به صورت سری متصل شود. اندازهگیریهای میدانی نشان میدهد که وقتی یک پیشران ۶kV/۱۵۰۰kVA موتور ۳۸۰kW یا بزرگتر را راهاندازی میکند، جریان لحظهای راهاندازی میتواند ۵-۸ برابر جریان اسمی باشد که بسیار بیشتر از تنظیمات محافظت جریان بیش از حد است.
برای سرکوب جریان راهاندازی، میتوان از یک مقاومت سیمپیچ یا واریستور غیرخطی اکسید روی با مقاومت ۱-۳Ω و قدرت اسمی ۲۰۰-۵۰۰W استفاده کرد. دومی دارای مقاومت سرد بالای ۱۰۰Ω است و با افزایش جریان به سرعت کاهش مییابد و جریان راهاندازی را به داخل ۲-۳ برابر مقدار اسمی محدود میکند. پس از راهاندازی موتور، وقتی فرکانس خروجی پیشران بیش از ۴۰Hz و جریان کمتر از مقدار اسمی باشد، فشار ولتاژ روی مقاومت کمتر از ۵۰V است.
در این مرحله، یک کنتکتور کوتاهمدار مقاومت را به صورت موازی قرار میدهد تا از تلفات پیوسته جلوگیری شود. اگر جریان در حین راهاندازی افزایش یابد، وقتی ترانسفورماتور جریان مقداری بیش از ۱۲۰۰A را تشخیص دهد، سیستم کنترل هشدار صادر میکند؛ اگر به ۱۵۰۰A برسد، پیشران فوراً IGBTها را مسدود میکند و کنتکتور کوتاهمدار را باز میکند و مقاومت محدودکننده جریان را دوباره وارد میکند تا جریان را به سرعت کاهش دهد. سپس کنتکتور کوتاهمدار دوباره بسته میشود تا عملکرد عادی بازگردد. کل فرآیند تغییر کمتر از ۰.۵ ثانیه طول میکشد و به طور موثر جریان اوج را سرکوب میکند، راهاندازی موتور را هموار میکند و قابلیت اطمینان پیشران را به طور قابل توجهی افزایش میدهد.
۳.۲ مدار کلیمینگ ولتاژ
برای سرکوب خطاهای ولتاژ بیش از حد، یک مدار کلیمینگ ولتاژ میتواند به صورت موازی به دیسی بس اضافه شود. این مدار عمدتاً شامل یک واریستور اکسید فلزی (MOV)، یک تایریستور سریع (GTO) و یک مدار تشخیصی است. دادههای میدانی نشان میدهد که محافظت نرمافزاری ولتاژ بیش از حد وقتی فلکشن ولتاژ شبکه بیش از ۱۵٪ یا کاهش بار باعث میشود ولتاژ دیسی بیش از ۱۳۰۰V برای بیش از ۲۰ms شود، فعال میشود.
برای جلوگیری از این خطاهای، میتوان از TYN-20/141 MOV استفاده کرد که ولتاژ تحریک ۱۴۲۰V، جریان تخلیه حداکثر ۲۰kA و ظرفیت جذب انرژی ۸۸۰۰J برای هر واحد دارد. وقتی ولتاژ بس بیش از ۱۳۵۰V شود، MOV شروع به هدایت میکند و انرژی اضافه را جذب میکند؛ اگر ولتاژ به ۱۴۰۰V برسد، GTO تحریک میشود و به سرعت انرژی ولتاژ بیش از حد را به یک مقاومت هدایت میکند تا ولتاژ به سطح ایمن بازگردد. مدار تشخیصی به طور مداوم ولتاژ بس را میاندازد.
وقتی ولتاژ کمتر از ۱۲۵۰V شود و برای ۵۰ms باقی بماند، سیگنال رها شدن ارسال میشود، GTO خاموش میشود و عملکرد سیستم عادی بازگردد. اگر ولتاژ بس بیش از ۱۴۰۰V برای بیش از ۱۰۰ms باقی بماند، خطای ولتاژ بیش از حد شدید تشخیص داده میشود و پیشران وارد وضعیت قفل نرمافزاری میشود و نیاز به ریست شدن دستی قبل از راهاندازی مجدد دارد. تجربه نشان میدهد که با این مدار کلیمینگ، پیشران ۶kV میتواند ۳۵٪ ولتاژ بیش از حد لحظهای را تحمل کند و ولتاژ بیش از حد را در ۱۰۰ms به داخل ۱.۰۵ برابر ولتاژ اسمی سرکوب کند. پاسخ سریع و قابل اعتماد است و به طور موثر از راهاندازیهای مکرر ولتاژ بیش از حد جلوگیری میکند و قابلیت اطمینان و پیوستگی سیستم را به طور قابل توجهی افزایش میدهد.
۳.۳ طراحی تقسیم جریان
برای حل خطاهای گرم شدن بیش از حد، میتوان از فناوری تقسیم جریان برای کاهش تولید گرما در المانهای مهم مانند IGBTها و رادیاتورها استفاده کرد تا از راهاندازی گرمایی جلوگیری شود.
اجراءات خاص شامل اتصال ۱-۲ خازن الکترولیتی به صورت موازی به دو سمت مثبت و منفی دیسی بس هر واحد قدرت. خازنها باید دارای ظرفیت ۱۰۰۰-۲۲۰۰μF، ولتاژ اسمی ≥۱۶۰۰V و جریان موج مداوم ≥۱۰۰A باشند. وقتی جریان خروجی پیشران بیش از ۱.۲ برابر مقدار اسمی (به عنوان مثال ۹۰۰A) شود، این خازنهای موازی میتوانند ۱۰٪-۲۰٪ قابلیت تقسیم جریان را فراهم کنند و جریان واقعی از طریق IGBTها را به ۷۲۰-۸۱۰A کاهش دهند. با توجه به اینکه تلفات هدایت IGBT متناسب با مجذور جریان است، این رویکرد به طور موثر تولید گرما را کاهش میدهد.

در فرمول: PC تلفات هدایت IGBT (W) است؛ VCE ولتاژ اشباع IGBT (V) است که رابطه خطی با جریان IC (A) دارد؛ Uη ولتاژ روشن شدن IGBT (V) است؛ K عامل تقویت جریان IGBT است.
میتوان دید که پس از اتخاذ اقدامات تقسیم جریان، تلفات هدایت IGBT میتواند ۱۹٪ تا ۳۶٪ کاهش یابد و دمای اتصال چیپ میتواند ۱۰°سیلیزیوم تا ۲۵°سیلیزیوم کاهش یابد، بنابراین مشکل گرم شدن پیشران به طور قابل توجهی کاهش مییابد.
علاوه بر این، ۱ تا ۲ فن برق را به صورت موازی در ورودی و خروجی رادیاتور پیشران نصب کنید که با حجم هوا ≥ ۳۰۰۰ m³/h، میتواند به طور موثر کارایی خنکسازی رادیاتور را افزایش دهد. ۶ تا ۸ سنسور دما را در داخل کابین کنترل نصب کنید تا دماهای مختلف واحدهای قدرت، مادر بورد، بورد محرک IGBT و غیره را به طور زنده مانیتور کنید. وقتی دمای هر نقطه بیش از ۶۵°سیلیزیوم شود، سیستم کنترل فوراً فن برق را با سرعت کامل راهاندازی میکند و سیگنال "هشدار کاهش بار" را به واحد کنترل پیشران ارسال میکند.
اگر دما به ۷۵°سیلیزیوم برسد و بیش از ۱۰ دقیقه بماند، سیستم سیگنال "هشدار دمای بیش از حد" را صادر میکند و جریان خروجی بیشینه پیشران را به زیر ۵۰٪ مقدار اسمی محدود میکند تا زمانی که دما به زیر ۶۰°سیلیزیوم برسد و "هشدار دمای بیش از حد" برداشته شود.
اگر دمای هر نقطه اندازهگیری بیش از ۸۵°سیلیزیوم شود و جریان موتور زیر ۳۰٪ مقدار اسمی نرسد، پیشران فوراً محافظت سختافزاری را فعال کرده و خروجی را متوقف میکند. برای بهبود بیشتر کارایی خنکسازی، از مواد نانو مانند گرافن یا نانولولههای کربنی روی رادیاتورهای IGBT هر واحد قدرت استفاده کنید، با استفاده از هدایت حرارتی بسیار بالای آنها برای تسهیل خنکسازی چیپهای IGBT و در نتیجه کاهش دمای اتصال.
۴ اثربخشی اقدامات پیشگیرانه
۴.۱ طراحی آزمایشی
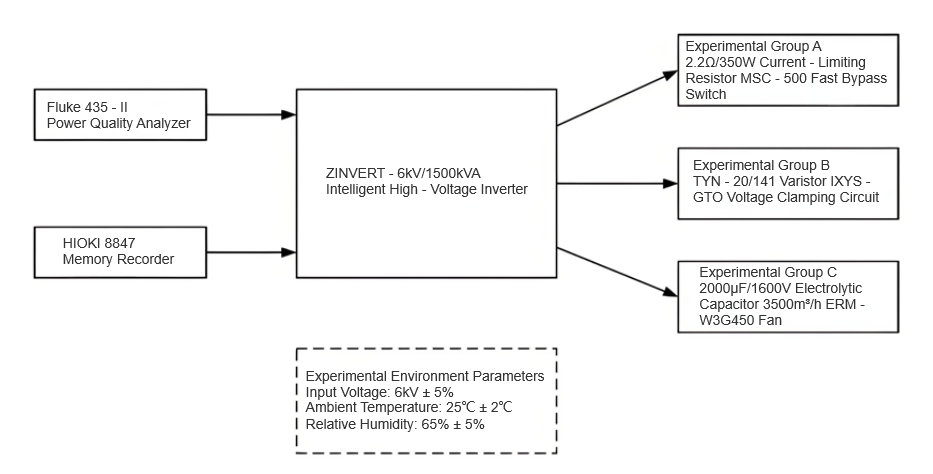
پیشران هوشمند فشار بالای ZINVERT-6kV/1500kVA به عنوان شیء آزمایشی استفاده شد و یک آزمایش کنترل گروهی انجام شد تا اثربخشی سه اقدام پیشگیرانه پیشنهادی را تأیید کند. آزمایشها در شرایط عملیاتی اسمی (ولتاژ ورودی: ۶kV±5٪؛ دمای محیط: ۲۵°سیلیزیوم±2°سیلیزیوم؛ رطوبت نسبی: ۶۵٪±5٪) انجام شد. آزمایش به چهار گروه تقسیم شد: گروه کنترل هیچ اقدام پیشگیرانهای را اتخاذ نکرد؛ گروه A از یک مقاومت محدودکننده جریان ۲.۲Ω/۳۵۰W با یک کلید کوتاهمدار MSC-500 استفاده کرد؛ گروه B از یک مدار کلیمینگ ولتاژ تشکیل شده از یک واریستور TYN-20/141 و یک IXYS-GTO به صورت موازی استفاده کرد، با ولتاژ کلیمینگ تنظیم شده در ۱۴۲۰V؛ گروه C از یک خازن الکترولیتی ۲۰۰۰μF/۱۶۰۰V (سری HCG هیتاشی) به صورت موازی برای تقسیم جریان و یک فن متغیر سرعت ۳۵۰۰ m³/h (EBM-W3G450) برای خنکسازی اجباری استفاده کرد.
هر گروه به طور مداوم برای ۷۲ ساعت عملیاتی بود، با ثبت پارامترهای کلیدی مانند جریان خروجی پیشران، ولتاژ دیسی بس و دمای اتصال IGBT هر ۶ ساعت یک بار. دادهها با استفاده از تحلیلگر کیفیت برق Fluke 435-II و رکوردر داده HIOKI 8847 جمعآوری شدند. در طول آزمایش، سه سناریوی خطا معمولی شبیهسازی شد: جریان بیش از حد در راهاندازی (۸ برابر جریان اسمی / ۰.۵s)، نوسان ولتاژ شبکه (+۲۰٪ / ۱s) و عملیات با بار کامل (دمای محیط ۳۵°سیلیزیوم / ۲h). تنظیم آزمایش در شکل ۱ نشان داده شده است.
۴.۲ تحلیل نتایج
پس از ۷۲ ساعت عملیاتی مداوم، دادههای چهار گروه جمعآوری و تحلیل شدند، با نتایج در جدول ۱ ارائه شد. گروه کنترل در تمام سه شرایط خطا راهاندازی کرد، در حالی که گروههای آزمایشی با اقدامات پیشگیران










