
Kun teollisuuden tuotannon ydin, sähköautomaatiot, vaikuttavat suoraan kokonaispäätöksiin ja ympäristövaikutuksiin. Perinteinen vakiohnopeus toiminta usein johtaa energian hävikkiin vaihteleviin kuormituksen vaatimuksiin reagoitaessa ja tarkka prosessin hallinta on vaikeata saavuttaa. Muuttuvan suuntahajonnan nopeuden säädöstechnologia, joka on edistynyt moottorin hallintametodi, tarjoaa lupaavan ratkaisun näihin ongelmiin. Tämä tutkimus käsittelee voimalan sähköautomaatiojärjestelmää esimerkkinä, jossa tarkastellaan muuntajan nopeuden säädösperustaisen uudelleenvarustuksen hanketta ja sen energiatehokkuuseffektejä, pyrkien tarjoamaan viitekehystä samankaltaisissa teollisuustilanteissa.
1 Nykytila ja uudelleenvarustuksen vaatimukset muuntajateknologian soveltamisessa sähköautomaatioon
1.1 Olemassa oleva laitteisto
Voimalan sähköautomaatiojärjestelmä koostuu pääasiassa kolmesta osasta: sähköntarvejärjestelmästä, moottorivoimanohjauksista ja ohjausjärjestelmästä. Sähköntarvejärjestelmään kuuluu 10 kV korkeanpaineinen kytkentälaatikko, muuntimet ja 400 V alipaininen kytkentälaatikko, joiden välillä on puurakenteinen sähköntarve. Moottorivoimat ovat pääosin asynkronimoottoreita, jotka ohjataan suoraan tai tähtitriangulaation avulla. Paikalliset laitteet, kuten kierrätyssivuvesijoukkot, jäädytysvesijoukkot ja syöttövesijoukkot, muodostavat suurimman osan paikallisista laitteista. Nämä laitteet toimivat vakiohnopeudella, ja virtaus ohjataan valvun avulla, mikä johtaa korkeaan energiankulutukseen. Nykyinen järjestelmä on suhteellisen hajautettu, mutta osittain keskitetty. Yläosa monitoring-järjestelmä kommunikoi kentän ohjausjärjestelmien kanssa teollisessa Ethernet-verkossa, mikä mahdollistaa keskitetyn datanäyttön ja etäkäyttö. Kuitenkin nykyinen ohjausjärjestelmä puuttuu edistyneistä ohjausalgoritmeista muuttuvan suuntahajonnan nopeuden säädöksessä, mikä johtaa puutteisiin energiahallinnassa ja prosessin optimoinnissa.
1.2 Uudelleenvarustuksen vaatimukset
Nykyisen laitteiston tilan perusteella sähköautomaatiojärjestelmän uudelleenvarustuksen vaatimukset keskittyvät ennen kaikkea energiatehokkuuden parantamiseen ja ohjauksen optimointiin. On välttämätöntä ottaa käyttöön muuntajaohjauksen nopeuden säädötekniikka, joka mahdollistaa tehokkaan toiminnan vesijoukkot ja ilmajoukkot sopeuttamalla moottorin nopeutta kuormituksen vaatimuksiin.
Samalla, hyödyntäen olemassa olevia vesiasematoimiloita ja tuotantoasemia, on kiireellistä rakentaa älykäs monitoring-alusta, joka noudattaa tason 2 kyberturvallisuussuojelua. Pilvipalvelujen ja IoT-teknologian yhdistelmänä tämä alusta mahdollistaa yrityksen hallinnon ja kenttäohjauksen välinen tiivis integrointi. Järjestelmäarkkitehtuuri omaksuu kolmen tason rakenne "keskusplatform + hajautetut alajärjestelmät + mobiilitermit", varmistamalla reaaliaikaisen datan keräämisen, tehokkaan käsittelyn ja turvallisen tallennuksen.
Keskusplatform, joka rakennetaan korkeasuorituskykyiselle palvelinclusterille, käyttää edistyneitä datananalysointialgoritmeja tarkkaa päätöksentuetta varten. Hajautetut alajärjestelmät sisältävät moduulit laitteiston tilan monitoroinnille, videovälitysvalvonnalle ja ympäristöparametrien keräämiselle, kattavasti kattamassa kaikki tuotantomuodot. Mobiilitermit, mukautetuilla sovelluksilla, mahdollistavat etämonitoroinnin ja välittömät ilmoitukset.
2 Energiatehokkuuseffektien teoreettinen perusta
Tutkimuksessa energiatehokkuuseffektien analyysi muuntajan nopeuden säädöstechnologiassa perustuu ensisijaisesti tuuletinkuormien ja vesijoukkotyöntäjien affiniteetti lakeihin sekä muuttuvan suuntahajonnan nopeuden säädön energia-muunnosperiaatteisiin. Laitteiston toimintatilan mukaan suuri määrä vesijoukkot ja tuuletin toimivat vakiohnopeudella, jossa virtaus ohjataan valvun avulla, mikä johtaa huomattaviin energian häviöihin. Toisaalta, muuttuvan suuntahajonnan nopeuden säädös sopeuttaa moottorin nopeutta kuormituksen vaatimuksiin, mikä johtaa energiansäästöihin. Tuuletinkuormien ja vesijoukkotyöntäjien affiniteetti lakit perustuvat virtauksen, nosto- ja tehon välisiin suhteisiin, ja laskentakaavat ovat seuraavat:
missä Q on virtaus (m³/h); n on pyöritysnopeus (r/min); H on nosto (m); P on teho (kW), missä P1 edustaa nimitehoa ja P2 teho pienennetyssä nopeudessa. Muuttuvan suuntahajonnan nopeuden säädön energia-muunnoskaava on:

Näiden teoreettisten suhteiden perusteella, kun järjestelmän virtausvaatimus pienenee, moottori automaattisesti vähentää nopeutta suuntahajonnan ohjaamalla, mikä merkittävästi vähentää tehotarvetta ja saavuttaa energiansäästöt. Tämä tarjoaa teoreettisen pohjan jatkossa toteutettavalle uudelleenvarustushankkeelle ja energiatehokkuusevaluoinnille.
3 Uudelleenvarustushanke muuntajan nopeuden säädöstechnologiassa
3.1 Sähköntarvejärjestelmän päivitys
Muuntajan nopeuden säädöstechnologian tehokkaan toteuttamisen tueksi tässä tutkimuksessa päivitettiin olemassa oleva sähköntarvejärjestelmä. Korkeanpaineiselle järjestelmälle 10 kV kytkentälaatikon lisättiin älykkäitä tyhjiölisytyksiä, joiden nominaalinen sähkövirta on vähintään 1 250 A ja lyhytsolmurompumiskyky 31,5 kA. Mikroprosessori-ohjaimia integroitui, tarjoamalla monitoimia suojauksia, kuten liikavirtasuojauksen, lyhytsolmusuojauksen ja maasuojauksen, vasta-aika alle 20 ms. Sähkölaadun monitoring-järjestelmä myös otettiin käyttöön, käyttäen luokan A tarkkuudella sensoreita, jotka monitoroivat parametrejä, kuten harmoninen sisältö, jännitevaihtelut ja kolmijohde epätasapaino, taatakseen järjestelmän vakauden.
Alipaineiselle järjestelmälle 400 V järjestelmä oli päivityksen keskipiste. Olemassa olevaan järjestelmään lisättiin erityiset muuntajaliikennevirrat käyttäen itsenäisiä liikennelaatikkoja, jotka olivat varustettu älykkäillä painotettujen mallien sähkönsyöntikytkimillä. Nominaalinen sähkövirta valittiin 400 A ja 630 A väliltä kuorman vaatimusten mukaan, ominaisuudet elektronisilla trip-yksiköillä tarkka liikavirta- ja lyhytsolmusuojaukselle. Jokainen muuntajaliikennevirta on varustettu irrotuskäskyllä, joka sopii kytkimen nominaaliseen sähkövirtaan ja sisältää näkyvän katkon ominaisuuden helpottamaan laitteiston huoltoa.
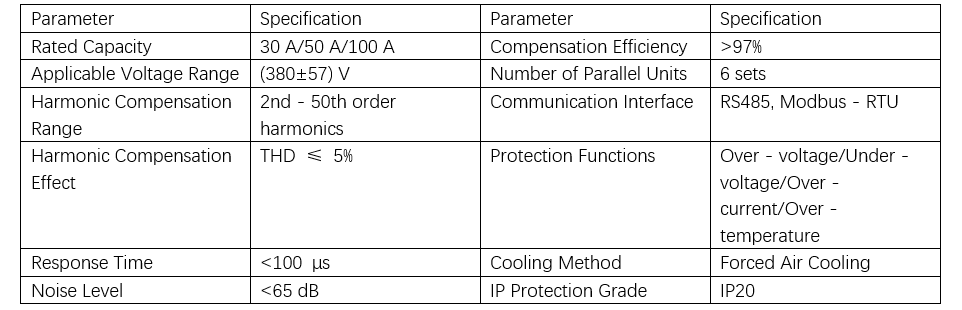
Harmonisten väännösten lievittämiseksi aktiiviset sähköfiltterit (APF) asennettiin muuntajan syötteelle, tietyillä spesifikaatioilla kuten taulukossa 1.
Maanjohdinsysteemin optimoinnissa tämä tutkimus otti käyttöön TN-S johtotavan, erottaen neutraalijohdon (N) suojamaajohdosta (PE) aloittaen jakeluvalmistelusta. Pääsuojamaajohdoissa käytetään kuparin johtimateriaaleja, joiden poikkileikka-ala on vähintään 95 mm², varmistaakseen maajänniteen alle 1 Ω. Tasavirtajohdot lisättiin kriittisiin laitteisiin, kuten muuntajiin ja moottoreihin, käyttäen kuparin johtimateriaaleja, joiden poikkileikka-ala on suurempi kuin 16 mm². Tämä tehokkaasti hillitsee yhteismoodin häiriöitä ja parantaa järjestelmän EMC-ominaisuuksia [21].
3.2 Muuntajalaitteiston valinta ja parametrien optimointi
Muuntajien valinta perustuu tarkkaan kuormituksen ominaisuuksiin ja prosessivaatimuksiin. Vesijoukkotyöntäjien käsittelyyn valitaan vektorikontrollimuuntajat, joiden nominaleinen teho tiukasti vastaa moottorin tehoa, ja ylikuormituskyky 150%/1 min. Tässä tutkimuksessa valittiin ABB:n ACS880-sarjan muuntaja, jossa on DTC (Direct Torque Control) teknologia, jolla on torquen vasta-aika alle 5 ms ja nopeuden kontrollitarkkuus ±0,01%. Paikallisen ympäristön huomioiden käytettiin suljettu muuntaja IP54 suoja-arvolla, varustettuna pakotettuun ilmajäähdyttämishenkilöstöllä, varmistaakseen jäädytysilma virtaus vähintään 1 m³/(min·kW).
Parametrien optimoinnissa painopiste on PID-kontrolliparametrien säätöön ja muuntajan sisäänrakennetun itsesäädösalgoritmin käyttöön. Askelfunktion testaamisen avulla lasketaan optimaalinen verrannollinen kerroin Kp, integraalikerroin Ki ja derivaattakerroin Kd automaattisesti. PID-kontrollerin ulostulo u(t) laskentakaava on:

Muuntajan sisäänrakennetun itsesäädösalgoritmin avulla lasketaan automaattisesti optimaalinen verrannollinen kerroin Kp (alue: 0,1–100), integraalikausi Ti (alue: 0,1–3600 s) ja derivaatikausi Td (alue: 0–10 s) askelfunktion testaamisen avulla. Kiihtyvyysaika asetetaan 10–30 s ja hidastuma-aika 15–45 s, estääkseen tehokkaasti vedenvaikutuksen. Torquen rajaus otetaan käyttöön 120 %:lla moottorin nominaleisesta torquesta, estääkseen ylikuormituksen. Tuuletinlasteille aktivoitua muuntajan energiatehokkuusmoduuli: kevyt kuorma (kuorman osuus < 50%), ulostuleva jännite vähenee automaattisesti, maksimi vähennys 20 %. Samalla optimoidaan V/F-kaari lisäämällä jänniteulostus matalan nopeuden alueessa (0–10 Hz) varmistaakseen riittävän lähtötorquin.
Konfiguroitiin unohduksen ja heräämisfunktio: kun toimintataajuus pysyy 10 Hz alapuolella 60 s, muuntaja siirtyy unen tilaan; se herää automaattisesti, kun järjestelmän paine laskee 5 %, mikä parantaa järjestelmän tehokkuutta. Muuntajan perusasetuksissa kuljettajan taajuus asetetaan 4 kHz. Voimalan todellisten vaatimusten mukaan sähköjännitteen yliviivatyksen ja ali-viivatyksen suojauksen kynnysarvot asetetaan 418 V ja 304 V. Lisäksi konfiguroitiin moottorin nominaleiset parametrit ja useampi nopeusasetus, kuten taulukossa 2.

Sähkövirran rajoittamisen ja minimisähkövirran optimoinnin laskentakaavat ovat seuraavat:

missä Ilim on maksimisähkövirran raja; In on moottorin nominaleinen sähkövirta; Ismin on minimisähkövirta; Idopt on optimoinen magneettinen sähkövirta; ja Iq on torquen komponentti. Sähkövirran rajoittamisen ja minimisähkövirran optimoinnin strategioiden avulla saavutetaan tarkka moottorin toiminnan hallinta. Yli- ja ali-jännitensuojauksen asetukset varmistavat, että moottori toimii turvallisella alueella. Stallo-suojauksen ja sähkövirran rajoittamisen toimet estävät tehokkaasti ylikuormituksen. Lisäksi tämä hallintamenetelmä tukee Modbus-RTU-protokollan kautta tapahtuvaa etämonitorointia ja parametrien säätöä, mikä merkittävästi parantaa järjestelmän älykkyyttä.
3.3 Ohjausjärjestelmän päivitys ja integrointi
Ohjausjärjestelmän päivityksessä käytetään Siemensin S7-1500-sarjan PLC:tä, erityisesti CPU 1517-3 PN/DP-mallia, jolla on 2 ns bit-toiminnon nopeus ja 40 ns sanan toiminnon nopeus. PLC:ssä on 1,6 GB työmuisti ja 32 MB ladattava muisti, joka tukee PROFINET-, PROFIBUS- ja OPC UA-protokolleita. Järjestelmä käyttää hajautettua arkkitehtuuria ET 200SP-sarjan kaukopainotilaismoduuleilla, saavuttaen 250 μs viestintäsyklin PROFINETin avulla.
Ohjelmistojärjestelmä perustuu TIA Portal V16-integroituun kehitysympäristöön. PLC-ohjelma sisältää funktioplokkeja (FB) muuntajan viestintään,










