
Com a base de la producció industrial, els sistemes d'automatització elèctrica influeixen directament en els costos de producció generals i l'impacte ambiental. L'operació a velocitat constant tradicional sovint porta al despes dels recursos energètics quan es respon a les demandes variables de càrrega i dificulta el control precís del procés. La tecnologia de regulació de velocitat amb freqüència variable, com a mètode avançat de control de motors, ofereix una solució prometedora a aquests problemes. Aquest estudi pren com a exemple el sistema d'automatització elèctrica d'una central elèctrica per explorar un esquema de modernització basat en la tecnologia de control de velocitat amb inversor i els seus efectes d'estalvi d'energia, amb l'objectiu de proporcionar una referència per a millorar l'eficiència energètica en escenaris industrials similars.
1 Estat actual i requisits de modernització de les aplicacions d'inversors en l'automatització elèctrica
1.1 Equipament existent
El sistema d'automatització elèctrica de la central elèctrica es compón principalment de tres parts: el sistema de distribució d'energia, les unitats de conducció de motors i el sistema de control. El sistema de distribució d'energia inclou quadres de baixa tensió de 10 kV, transformadors i quadres de baixa tensió de 400 V, disposats en una estructura en arbre per a la distribució d'energia. Les conduccions de motors són motors asíncrons controlats principalment mitjançant inici directe o inici reduït en estrella-triangle. Les càrregues de bomba representen la major part de l'equipament a l'escena, incloent bombes de cicle d'aigua, bombes de refrigeració i bombes de alimentació. Aquests dispositius operen a velocitat constant, amb el flux reglamentat mitjançant vànecles, resultant en un alt consum d'energia. L'arquitectura del sistema existent és relativament descentralitzada, amb una gestió parcialment centralitzada. El sistema de monitorització superior comunica amb els sistemes de control de camp mitjançant Ethernet industrial per permetre la visualització centralitzada de dades i l'operació remota. No obstant això, el sistema de control actual no disposa d'algoritmes de control avançats per a la regulació de velocitat amb freqüència variable, el que comporta deficiències en la gestió d'energia i l'optimització del procés.
1.2 Requisits de modernització
Basant-se en l'estat actual de l'equipament, els requisits de modernització del sistema d'automatització elèctrica es centren principalment en millorar l'eficiència energètica i optimitzar el control. Cal introduir la tecnologia de control de velocitat basada en inversors per permetre l'operació eficient de bombes i ventiladors ajustant la velocitat del motor per adaptar-se a les necessitats de càrrega.
Alhora, utilitzant les estacions de bombes i les instal·lacions de producció existents, hi ha una necessitat urgente de construir una plataforma de monitorització intel·ligent que compleixi els requisits de protecció de ciberseguretat de nivell 2. Centrat en el càlcul en núvol i integrat amb la tecnologia IoT, aquesta plataforma permetrà una integració fluida entre la gestió empresarial i el control de camp. L'arquitectura del sistema adopta una estructura de tres nivells de "plataforma central + subsistemes distribuïts + terminus mòbils", assegurant l'adquisició de dades en temps real, el processament eficient i l'emmagatzemament segur.
La plataforma central, construïda sobre un clúster de servidors d'alt rendiment, implementa algoritmes avançats d'anàlisi de dades per proporcionar suport de decisió precís. Els subsistemes distribuïts inclouen mòduls per a la monitorització de l'estat de l'equipament, la vigilància per vídeo i la recol·lecció de paràmetres ambientals, cobrint exhaustivament tots els aspectes de les operacions de producció. Els terminus mòbils, a través d'aplicacions personalitzades, permeten la monitorització remota i les notificacions instantànies.
2 Base teòrica dels efectes d'estalvi d'energia
L'anàlisi dels efectes d'estalvi d'energia de la tecnologia de control de velocitat amb inversor en aquest estudi es basa principalment en les lleis d'afinitat per a ventiladors i bombes i els principis de conversió d'energia de la regulació de velocitat amb freqüència variable. Segons l'estat operatiu de l'equipament de la central, un gran nombre de bombes i ventiladors operen a velocitat constant amb el flux reglamentat mitjançant vànecles, resultant en pèrdues significatives d'energia. En contrast, el control de velocitat amb freqüència variable ajusta la velocitat del motor per adaptar-se a les necessitats de càrrega, assolint així un estalvi d'energia. Les lleis d'afinitat per a ventiladors i bombes s'estableixen basant-se en les relacions entre el caudal, la cota i la potència, amb les fórmules de càlcul rellevants següents:
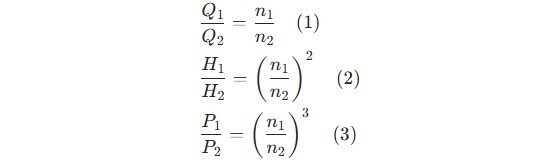
on Q és el caudal (m³/h); n és la velocitat de rotació (r/min); H és la cota (m); P és la potència (kW), amb P1 representant la potència nominal i P2 la potència a velocitat reduïda. La fórmula de conversió d'energia per a la regulació de velocitat amb freqüència variable és:

Basant-se en les relacions teòriques anteriors, quan la demanda de flux del sistema disminueix, el motor redueix automàticament la seva velocitat mitjançant el control de freqüència, rebaixant significativament el consum d'energia i assolint un estalvi d'energia. Això proporciona una base teòrica per al disseny de modernització posterior i l'avaluació de l'estalvi d'energia.
3 Esquema de modernització de la tecnologia de control de velocitat amb inversor
3.1 Actualització del sistema de distribució d'energia
Per implementar eficientment la tecnologia de control de velocitat amb inversor, aquest estudi va actualitzar el sistema de distribució d'energia existent. Per al sistema d'alta tensió, el quadre de 10 kV va ser millorat instal·lant interruptors de circuit intel·ligents a buit amb una intensitat nominal no inferior a 1.250 A i una capacitat de trencament de curtcircuït nominal de 31,5 kA. S'incorporaren relés de protecció basats en microprocessador, proporcionant protecció multifuncional, incloent sobrecorrent, curtcircuït i falla a terra, amb un temps de resposta inferior a 20 ms. També es va introduir un sistema de monitorització de la qualitat de l'electricitat, utilitzant sensors de alta precisió de classe A per monitoritzar paràmetres com el contingut harmònic, les fluctuacions de tensió i el desequilibri trifàsic en temps real, assegurant la estabilitat del sistema.
Per al sistema de baixa tensió, el sistema de 400 V va ser el focus de l'actualització. Es van afegir circuits de alimentació dedicats a l'inversor al sistema existent, utilitzant armari de distribució independents equipats amb interruptors de circuit mòldejat intel·ligents. La intensitat nominal es va seleccionar entre 400 A i 630 A basant-se en les necessitats de càrrega, caracteritzant-se per unitats de trip electròniques per a una protecció precisa de sobrecàrrega i curtcircuït. Cada circuit d'inversor està equipat amb un interruptor d'isolament que coincideix amb la intensitat nominal de l'interruptor de circuit i inclou una característica de tall visible per facilitar la manteniment de l'equipament.
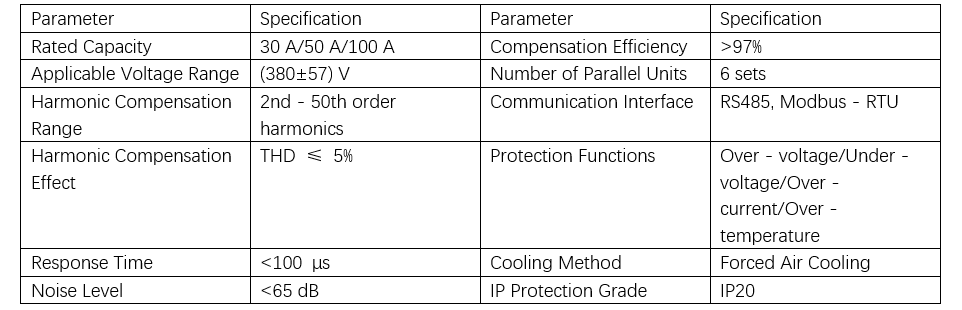
Per a la mitigació d'armònics, es van instal·lar filtres activs de potència (APF) a l'entrada de l'inversor, amb especificacions específiques com es llisten a la Taula 1.
Per a l'optimització dels sistemes de terra, aquest estudi va adoptar el mètode de cableat TN-S, separant la línia neutra (N) de la línia de terra de protecció (PE) a partir del quadre de distribució. La línia PE principal utilitza conductors de cobre amb una secció transversal no inferior a 95 mm² per assegurar una resistència de terra inferior a 1 Ω. Es van afegir barres de connexió d'igual potencial en ubicacions crítiques d'equipament com els inversors i els motors, utilitzant conductors de cobre amb una secció transversal superior a 16 mm². Això suprimeix eficientment la interferència de mode comú i millora el rendiment EMC del sistema [21].
3.2 Selecció i optimització de paràmetres de l'equipament d'inversor
La selecció d'inversors es basa en una correspondència precisa de les característiques de càrrega i els requisits del procés. Per a les càrregues de bomba, s'han triat inversors de control vectorial, amb la seva potència nominal estrictament corresponent a la del motor, i una capacitat de sobrecàrrega del 150%/1 min. Aquest estudi va seleccionar la sèrie d'inversors ABB ACS880, que disposa de la tecnologia DTC (Direct Torque Control), amb un temps de resposta de torsió inferior a 5 ms i una precisió de control de velocitat de ±0,01%. Considerant l'entorn on-site, s'ha utilitzat un inversor hermètic amb una classificació de protecció IP54, dotat d'un sistema de refredament forçat d'aire, assegurant un flux d'aire de refredament no inferior a 1 m³/(min·kW).
Per a l'optimització de paràmetres, l'enfocament es centra en ajustar els paràmetres de control PID i utilitzar l'algoritme de retuning automàtic integrat a l'inversor. A través de proves de resposta a l'escala, es calculen de manera automàtica els guanys proporcionals Kp, integral Ki i derivatiu Kd. La fórmula de càlcul de la sortida del controlador PID u(t) és:

S'utilitza l'algoritme de retuning automàtic integrat a l'inversor per calcular de manera automàtica el guany proporcional òptim Kp (rang: 0,1–100), el temps integral Ti (rang: 0,1–3600 s) i el temps derivatiu Td (rang: 0–10 s) a través d'una prova de resposta a l'escala. El temps d'acceleració es configura a 10–30 s i el temps de desacceleració a 15–45 s per prevenir eficientment l'efecte de martell hidràulic. Es habilita la limitació de torsió amb una configuració del 120% de la torsió nominal del motor per prevenir la sobrecàrrega. Per a les càrregues de ventilador, s'activa el mode d'estalvi d'energia de l'inversor: en condicions de càrrega lleugera (taxa de càrrega < 50%), la tensió de sortida es redueix automàticament, amb una reducció màxima de fins al 20%. Alhora, la corba V/F s'optimitza augmentant la tensió de sortida en el rang de velocitat baixa (0–10 Hz) per assegurar una suficient torsió d'arrancada.
Es configura una funció de repòs-despertar: quan la freqüència d'operació roman per sota de 10 Hz durant 60 s, l'inversor entra en mode de repòs; es desperta automàticament quan la pressió del sistema disminueix en un 5%, millorant així la eficiència del sistema. En les configuracions bàsiques de l'inversor, la freqüència portadora es configura a 4 kHz. Basant-se en els requisits reals de la central elèctrica, els llindars de protecció contra sobretensió i subtensió es configuren a 418 V i 304 V, respectivament. Addicionalment, es configuren els paràmetres nominals del motor i les configuracions d'operació multivelocitat com es detallen a la Taula 2.

Les fórmules de càlcul per a la limitació de corrent i l'optimització de la corrent mínima són respectivament les següents:

on Ilim és el límit màxim de corrent; In és la corrent nominal del motor; Ismin és la corrent stator mínima; Idopt és la corrent d'excitació òptima; i Iq és el component de corrent de torsió. Incorporant estratègies de limitació de corrent i optimització de corrent mínima, es consigueix un control fin i detallat de l'operació del motor. Les configuracions de protecció contra sobretensió i subtensió asseguren que el motor opera dins d'un rang segur. Les mesures de protecció contra el bloqueig i la limitació de corrent prevenen eficientment la sobrecàrrega. A més, aquest mètode de control suporta la comunicació via el protocol Modbus-RTU, permetent la monitorització remota i l'ajust de paràmetres, incrementant significativament el nivell d'intel·ligència del sistema.
3.3 Actualització i integració del sistema de control
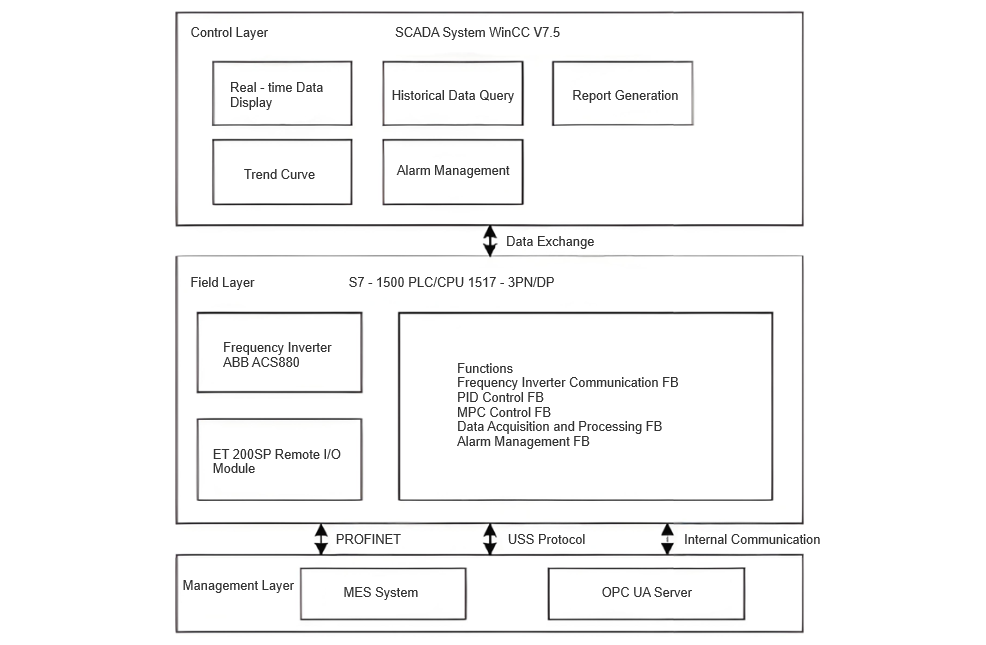
L'actualització del sistema de control utilitza la sèrie de PLC Siemens S7-1500, específicament el model CPU 1517-3 PN/DP, que disposa d'una velocitat d'operació de bits de 2 ns i una velocitat d'operació de paraules de 40 ns. El PLC està equipat amb 1,6 GB de memòria de treball i 32 MB de memòria de càrrega, suportant protocols de comunicació inclosos PROFINET, PROFIBUS i OPC UA. El sistema adopta una arquitectura distribuïda amb mòduls I/O remots de la sèrie ET 200SP, assolint un cicle de comunicació de 250 μs via PROFINET.
L'arquitectura de programari es basa en l'entorn de desenvolupament integrat TIA Portal V16. El programa del PLC inclou blocs de funcions (FBs) per a la comunicació amb l'inversor, el control PID, el Model Predictive Control (MPC), la preprocesat de la captura de dades i la gestió d'alarms. El marc de sistema detallat es mostra a la Figura 1.
4 Anàlisi dels efectes d'estalvi d'energia
Els beneficis d'estalvi d'energia de la tecnologia de control de velocitat amb










