
Jako rdzeń produkcji przemysłowej, systemy automatyzacji elektrycznej bezpośrednio wpływają na całkowite koszty produkcji i wpływ na środowisko. Tradycyjna stała prędkość działania często prowadzi do marnowania energii przy reagowaniu na zmienny popyt obciążenia i utrudnia precyzyjną kontrolę procesu. Technologia regulacji prędkości zmiennoprądowej, jako zaawansowana metoda sterowania silnikami, oferuje obiecujące rozwiązanie tych problemów. Niniejsze badanie opiera się na przykładzie systemu automatyzacji elektrycznej w elektrowni, aby zbadać schemat modernizacji oparty na technologii sterowania prędkością przez inwerter oraz jego efekty oszczędzania energii, mając na celu dostarczenie odniesienia dla poprawy efektywności energetycznej w podobnych scenariuszach przemysłowych.
1 Obecny stan i wymagania dotyczące modernizacji zastosowań inwerterów w automatyzacji elektrycznej
1.1 Istniejące urządzenia
System automatyzacji elektrycznej w elektrowni składa się głównie z trzech części: systemu dystrybucji energii, jednostek napędowych silników i systemu sterowania. System dystrybucji energii obejmuje wysokonapiętne szafy przełączników 10 kV, transformatory i niskonapięte szafy przełączników 400 V, ułożone w strukturze drzewiastej do dystrybucji energii. Napędy silników są głównie asynchroniczne, sterowane metodą bezpośredniego uruchomienia lub redukcji napięcia w trybie gwiazda-trójkąt. Największą część sprzętu na terenie stanowią pompowe obciążenia, w tym pompy cyrkulacyjne, chłodnicze i podajne. Te urządzenia działają ze stałą prędkością, z regulacją przepływu za pomocą zaworów, co powoduje wysokie zużycie energii. Istniejąca architektura systemu jest stosunkowo rozproszona, z częściowym zarządzaniem centralnym. Górny system monitorowania komunikuje się z polowymi systemami sterowania poprzez przemysłowy Ethernet, umożliwiając centralne wyświetlanie danych i zdalne operacje. Jednak obecny system sterowania brakuje zaawansowanych algorytmów sterowania prędkością zmiennoprądową, co prowadzi do niedostatków w zarządzaniu energią i optymalizacji procesu.
1.2 Wymagania dotyczące modernizacji
Na podstawie obecnego stanu urządzeń, wymagania dotyczące modernizacji systemu automatyzacji elektrycznej skupiają się przede wszystkim na poprawie efektywności energetycznej i optymalizacji sterowania. Należy wprowadzić technologię sterowania prędkością opartą na inwerterach, aby umożliwić efektywne działanie pomp i wentylatorów poprzez dostosowanie prędkości silników do potrzeb obciążenia.
W tym samym czasie, wykorzystując istniejące stacje pomp i obiekty produkcyjne, istnieje pilna potrzeba budowy inteligentnej platformy monitorowania zgodnej z wymogami ochrony cyberbezpieczeństwa poziomu 2. Opierając się na obliczeniach w chmurze i integracji z technologią IoT, ta platforma umożliwi bezproblemową integrację między zarządzaniem przedsiębiorstwem a sterowaniem na terenie. Architektura systemu przyjmuje trójwarstwową strukturę „centralna platforma + rozproszone podsystemy + mobilne terminale”, zapewniając natychmiastowe pozyskiwanie danych, efektywne przetwarzanie i bezpieczne przechowywanie.
Centralna platforma, zbudowana na klasterze serwerów wysokiej wydajności, wdraża zaawansowane algorytmy analizy danych, aby dostarczać dokładne wsparcie decyzyjne. Rozproszone podsystemy obejmują moduły monitorowania stanu sprzętu, nadzoru wideo i zbierania parametrów środowiskowych, obejmując kompleksowo wszystkie aspekty operacji produkcyjnych. Mobilne terminale, poprzez dedykowane aplikacje, umożliwiają zdalny monitoring i natychmiastowe powiadomienia.
2 Teoretyczne podstawy efektów oszczędzania energii
Analiza efektów oszczędzania energii technologii sterowania prędkością inwerterowej w tym badaniu opiera się przede wszystkim na prawach afinicznych dla wentylatorów i pomp oraz zasadach przekształcania energii w regulacji prędkości zmiennoprądowej. Na podstawie statusu operacyjnego sprzętu zakładu, duża liczba pomp i wentylatorów działa ze stałą prędkością, z regulacją przepływu za pomocą zaworów, co powoduje znaczne straty energetyczne. W porównaniu z tym, sterowanie prędkością zmiennoprądowe dostosowuje prędkość silnika do potrzeb obciążenia, osiągając tym samym oszczędność energii. Prawa afiniczne dla wentylatorów i pomp są ustanawiane na podstawie relacji między przepływem, ciśnieniem i mocą, z odpowiednimi wzorami obliczeniowymi następującymi:
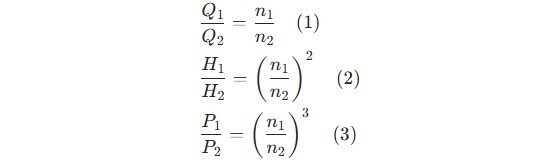
gdzie Q to przepływ (m3/h); n to prędkość obrotowa (obr/min); H to wysokość podnoszenia (m); P to moc (kW), gdzie P1 reprezentuje moc nominalną, a P2 moc przy zmniejszonej prędkości. Wzór przekształcenia energii dla regulacji prędkości zmiennoprądowej to:

Na podstawie powyższych teoretycznych relacji, gdy potrzeby przepływu systemu maleją, silnik automatycznie zmniejsza prędkość poprzez kontrolę częstotliwości, znacznie obniżając zużycie energii i osiągając oszczędność. To stanowi teoretyczną podstawę dla kolejnej projektu modernizacji i oceny oszczędzania energii.
3 Schemat modernizacji technologii sterowania prędkością inwerterowej
3.1 Uaktualnienie systemu dystrybucji energii
Aby skutecznie wdrożyć technologię sterowania prędkością inwerterową, w tym badaniu uaktualniono istniejący system dystrybucji energii. Dla systemu wysokonapiętnego, szafy przełączników 10 kV zostały wzmocnione poprzez instalację inteligentnych próżniowych przerywaczy z prądem nominalnym nie mniejszym niż 1 250 A i prądem krótkiego spięcia wynoszącym 31,5 kA. Zintegrowano mikroprocesorowe relé ochronne, zapewniające wielofunkcyjną ochronę, w tym przeciwprądową, przeciwkrótkozamkaniową i przeciwko awariom ziemi, z czasem reakcji poniżej 20 ms. Wprowadzono również system monitorowania jakości energii elektrycznej, korzystający z czujników wysokiej precyzji klasy A, aby monitorować parametry takie jak zawartość harmonicznych, fluktuacje napięcia i nierównowaga trójfazowa w czasie rzeczywistym, zapewniając stabilność systemu.
Dla systemu niskonapiętnego, głównym celem modernizacji był system 400 V. Do istniejącego systemu dodano dedykowane linie zasilające inwerterów, używając niezależnych szaf rozdzielczych wyposażonych w inteligentne przerywacze automatyczne. Prąd nominalny został wybrany w zakresie od 400 A do 630 A, w zależności od potrzeb obciążenia, z jednostkami wyłączania elektronicznego zapewniającymi precyzyjną ochronę przeciwprądową i przeciwkrótkozamkaniową. Każda linia inwertera jest wyposażona w przełącznik izolujący dopasowany do prądu nominalnego przerywacza i ma widoczny przeryw, ułatwiający konserwację sprzętu.
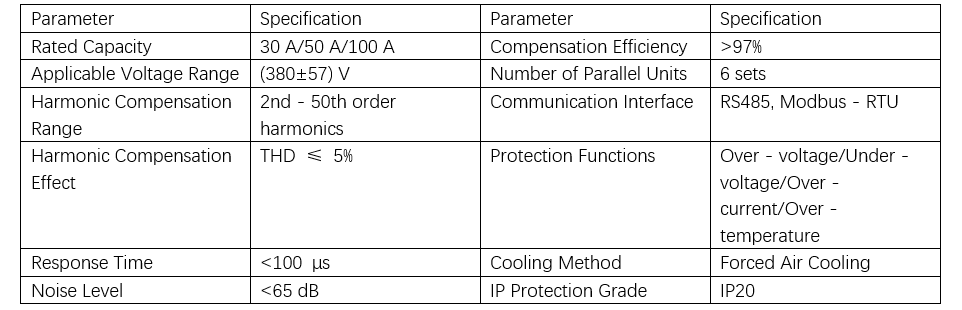
Do łagodzenia harmonicznych, na wejściu inwertera zainstalowano aktywne filtry mocy (APF) o specyfikacjach wymienionych w tabeli 1.
W celu optymalizacji systemów ziemnych, w tym badaniu zastosowano metodę kablowania TN-S, oddzielając linię neutralną (N) od linii ziemnej ochronnej (PE) od szafy rozdzielczej. Główna linia PE używa przewodów miedzianych o przekroju przynajmniej 95 mm2, aby zapewnić rezystancję gruntu poniżej 1 Ω. Dodano paski równopotencjalne w kluczowych lokalizacjach sprzętu, takich jak inwertery i silniki, używając przewodów miedzianych o przekroju większym niż 16 mm2. To efektywnie tłumione interferencje wspólnego trybu i zwiększa wydajność EMC systemu [21].
3.2 Wybór i optymalizacja parametrów sprzętu inwerterowego
Wybór inwerterów opiera się na precyzyjnym dopasowaniu charakterystyk obciążenia i wymagań procesowych. Dla obciążeń pompowych wybierane są inwertery sterowania wektorowego, z mocą nominalną ścisłe odpowiadającą mocy silnika, a możliwością przeciążenia 150%/1 min. W tym badaniu wybrano inwerter serii ABB ACS880, który posiada technologię DTC (Direct Torque Control), z czasem odpowiedzi momentu poniżej 5 ms i dokładnością sterowania prędkością ±0,01%. Biorąc pod uwagę warunki na miejscu, użyto szczelnego inwertera z stopniem ochrony IP54, wyposażonego w system wymuszanego chłodzenia powietrzem, zapewniający przepływ chłodziącego powietrza nie mniejszy niż 1 m3/(min·kW).
W celu optymalizacji parametrów, skupiono się na dostosowaniu parametrów regulatora PID i wykorzystaniu wbudowanego algorytmu samodopasowania inwertera. Poprzez testowanie odpowiedzi skokowej, obliczono optymalne wzmocnienie proporcjonalne Kp, wzmocnienie całkujące Ki i wzmocnienie różniczkujące Kd są automatycznie obliczane. Wzór na wyjście regulatora PID u(t) to:

Wbudowany algorytm samodopasowania inwertera służy do automatycznego obliczania optymalnego wzmocnienia proporcjonalnego Kp (zakres: 0,1–100), czasu całkowania Ti (zakres: 0,1–3600 s) i czasu różniczkowania Td (zakres: 0–10 s) poprzez test odpowiedzi skokowej. Czas przyspieszenia ustawiono na 10–30 s, a czas spowolnienia na 15–45 s, aby skutecznie zapobiegać efektom uderzenia wodnego. Włączono ograniczenie momentu, ustawiając go na 120% momentu nominalnego silnika, aby zapobiec przeciążeniu. Dla obciążeń wentylatorów, aktywowano tryb oszczędzania energii inwertera: w warunkach lekkiego obciążenia (stosunek obciążenia < 50%), automatycznie obniżono napięcie wyjściowe, maksymalnie o 20%. Ponadto zoptymalizowano krzywą V/F, zwiększając napięcie wyjściowe w zakresie niskiej prędkości (0–10 Hz), aby zapewnić wystarczający moment startowy.
Skonfigurowano funkcję snu i budzenia: gdy częstotliwość pracy pozostaje poniżej 10 Hz przez 60 s, inwerter wchodzi w tryb snu; automatycznie budzi się, gdy ciśnienie systemu spadnie o 5%, dalsze zwiększając efektywność systemu. W podstawowych ustawieniach inwertera, częstotliwość nośna ustawiona jest na 4 kHz. Na podstawie rzeczywistych wymagań elektrowni, progi ochrony przed nadnapięciem i niedonapięciem ustawiono odpowiednio na 418 V i 304 V. Dodatkowo skonfigurowano parametry nominalne silnika i ustawienia wieloprędkości, jak szczegółowo opisano w tabeli 2.

Wzory obliczeniowe dla ograniczenia prądu i optymalizacji minimalnego prądu są odpowiednio następujące:

gdzie Ilim to maksymalne ograniczenie prądu; In to prąd nominalny silnika; Ismin to minimalny prąd statora; Idopt to optymalny prąd pobudzenia; a Iq to składowa prądu momentu. Poprzez włączenie strategii ograniczania prądu i optymalizacji minimalnego prądu, osiągnięto precyzyjne sterowanie pracą silnika. Ustawienia ochrony przed nadnapięciem i niedonapięciem zapewniają, że silnik działa w bezpiecznym zakresie. Ochrona przed zacięciem i środki ograniczające prąd skutecznie zapobiegają przeciążeniom. Ponadto, ta metoda sterowania obsługuje komunikację za pomocą protokołu Modbus-RTU, umożliwiając zdalny monitoring i dostosowywanie parametrów, co znacznie zwiększa poziom inteligencji systemu.
3.3 Uaktualnienie i integracja systemu sterowania
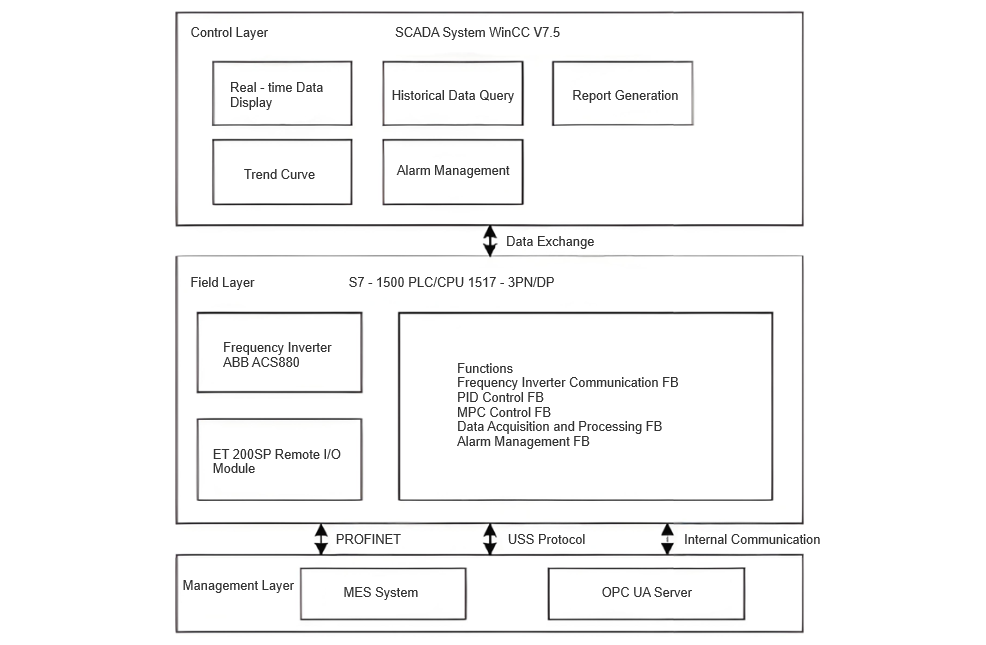
Uaktualnienie systemu sterowania polega na zastosowaniu PLC serii Siemens S7-1500, konkretnie modelu CPU 1517-3 PN/DP, który ma szybkość operacji bitowej 2 ns i szybkość operacji słownej 40 ns. PLC wyposażony jest w 1,6 GB pamięci roboczej i 32 MB pamięci ładunkowej, obsługuje protokoły komunikacji, takie jak PROFINET, PROFIBUS i OPC UA. System wykorzystuje rozproszoną architekturę z modułami zdalnymi I/O serii ET 200SP, osiągając cykl komunikacji 250 μs za pomocą PROFINET.
Architektura oprogramowania opiera się na zintegrowanym środowisku programistycznym TIA Portal V16. Program PLC obejmuje bloki funkcji (FB) do komunikacji z inwerterem, sterowania PID, Model Predictive Control (MPC), wstępnej obróbki danych pomiarowych i zarządzania alarmami. Szczegółowy ram systemu przedstawiono na rysunku 1.
4 Analiza efektów oszczędzania energii
Efekty oszczędzania energii technologii sterowania prędkością inwerterowej są przede wszystkim widoczne w zmniejszonym zużyciu energii i poprawionej efektywności systemu. Porównując dane zużycia energii przed i po modernizacji, można ilościowo oc










