
As die kern van industriële produksie, het elektriese outomatiseringstelsel beïnvloed direk die algehele produksiekoste en omgewingsimpak. Tradisionele konstantespoedbedryf lei dikwels tot energieverbruik wanneer daar op veranderlike belastingvraag gereageer word en maak dit moeilik om presiese prosesbeheer te bereik. Variabele frekwensiespoedregulerings tegnologie bied as 'n gevorderde motorbeheermetode 'n veelbelovende oplossing vir hierdie kwessies. Hierdie studie neem die elektriese outomatiseringstelsel van 'n kragstasie as voorbeeld om 'n opleidingsskema gebaseer op inverteerspoedbeheertegnologie en sy energiebesparings effekte te ondersoek, met die doel om 'n verwysing te verskaf vir energie-effektiwiteitsverbeterings in soortgelyke industriële situasies.
1 Huidige Status en Opleidingsvereistes van Inverter-toepassings in Elektriese Outomatisering
1.1 Bestaande Toerusting
Die elektriese outomatiseringstelsel van die kragstasie bestaan hoofsaaklik uit drie dele: die kragverspreidingsstelsel, motor-aandryf-eenhede, en die beheerstelsel. Die kragverspreidingsstelsel sluit 10 kV hoëspanningsluistertuig, transformateurs, en 400 V laagspanningsluistertuig in, gearrangeer in 'n boomstruktuur vir kragverspreiding. Motor-aandrywe is hoofsaaklik asinchronuse motore wat deur direkte-op-of ster-delta verminderde-spanning startmetodes beheer word. Pomp-belastings maak die grootste deel van die aanwezige toerusting uit, insluitend sirkulasiewater-pompe, koelwater-pompe, en voedwater-pompe. Hierdie toestelle bedryf by konstante spoed, met vloei gereguleer deur ventiele, wat gelei tot hoë energieverbruik. Die bestaande stelselargitektuur is relatief verspreid, met gedeeltelike gesentraliseerde bestuur. Die bovlaks beheerstelsel kommunikeer met veldbeheerstelsels deur industriële Ethernet om gesentraliseerde datavisualisering en afstandbediening te bewerkstellig. Echter, die huidige beheerstelsel het nie gevorderde beheeralgoritmes vir variabele frekwensiespoedregulerings nie, wat lei tot tekortkominge in energiebestuur en prosesoptimering.
1.2 Opleidingsvereistes
Gebaseer op die huidige toestand van die toerusting, fokus die opleidingsvereistes vir die elektriese outomatiseringstelsel hoofsaaklik op die verbetering van energie-effektiwiteit en beheer-optimering. Dit is nodig om inverter-gebaseerde spoedbeheertegnologie in te voer om pomp- en waaiervraagdoelmatig te laat bedryf deur die motorspoed aan te pas om aan belastingvraag te voldoen.
Tegelykertyd, deur gebruik te maak van bestaande pompstasies en produksiefasiliteite, is daar 'n dringende behoefte om 'n intelligente moniteringplatform te bou wat aan Niveau 2 kyberveiligheidseisemente voldoen. Met die middelpunt op wolkrekenaar en geïntegreerd met IoT-tegnologie, sal hierdie platform naadlose integrasie tussen ondernemingbestuur en veldbeheer bewerkstellig. Die stelselargitektuur volg 'n drielaagse struktuur van "sentrale platform + verspreide substelsels + mobiele eindpunte", wat verseker dat data in real-time ingewin, doeltreffend verwerk, en veilig gestoor word.
Die sentrale platform, gebou op 'n hoogvermoënserverscluster, deploie gevorderde data-analisealgoritmes om akkurate besluitnemingondersteuning te verskaf. Verspreide substelsels sluit modules in vir toestandmonitering van toerusting, video-bewaking, en omgewingsparameterinsameling, wat al die aspekte van produksieoperasies komples dek. Mobiele eindpunte, deur gepersonaliseerde toepassings, maak afstandsmonitering en onmiddellike kennisgewings moontlik.
2 Teoretiese Grondslag van Energiebesparingseffekte
Die analise van energiebesparingseffekte van inverter-spoedbeheertegnologie in hierdie studie is hoofsaaklik gebaseer op die affiniteitwette vir waaiers en pompe en die energie-omskakelingsbeginsels van variabele frekwensiespoedregulerings. Volgens die operasionele status van die aanleg se toerusting bedryf 'n groot aantal pompe en waaiers by konstante spoed met vloei gereguleer deur ventiele, wat gelei tot aansienlike energieverlies. Inteendeel, variabele frekwensiespoedbeheer pas die motorspoed aan om aan belastingvraag te voldoen, daardeur energiebesparings te bereik. Die affiniteitwette vir waaiers en pompe word gebaseer op die verhoudings tussen vloei, spanningshoogte, en krag, met die relevante berekeningformules as volg:
waar Q die vloei (m³/h) is; n die rotasiespoed (r/min) is; H die spanningshoogte (m) is; P die krag (kW) is, met P1 die nommerkrag en P2 die krag by verminderde spoed. Die energie-omskakelingsformule vir variabele frekwensiespoedregulerings is:

Gebaseer op die bostaande teoretiese verhoudings, as die stelselvloei-vraag verminder, verlaag die motor outomaties die spoed deur frekwensiebeheer, wat aansienlik die kragverbruik verminder en energiebesparings bewerkstellig. Dit verskaf 'n teoretiese grondslag vir die latere opleidingsontwerp en energiebesparingsevaluering.
3 Opleidingskema van Inverter-spoedbeheertegnologie
3.1 Kragverspreidingsstelsel Opgradering
Om inverter-spoedbeheertegnologie doeltreffend te implementeer, is die bestaande kragverspreidingsstelsel in hierdie studie opgegradeer. Vir die hoëspanningsstelsel is die 10 kV luistertuig versterk deur die installasie van intelligente vakuum-sirkuitskringers met 'n nommerstrooom van minstens 1,250 A en 'n nommershort-sirkuit-verbrekerskapasiteit van 31.5 kA. Mikroprosessor-gebaseerde beskermrelais is geïntegreer, wat multi-funksie beskerming insluit, insluitend oorkoerent, short-sirkuit, en grondfout, met 'n reaksietyd onder 20 ms. 'n Kragkwaliteitsmoniteringstelsel is ook bekendgestel, wat Klask-A-graad hoëpresisie sensore gebruik om parameters soos harmonie-inhoud, spanningsfluktuasies, en driedraad-onbalans in real-time te moniter, wat stelselstabiliteit verseker.
Vir die laagspanningsstelsel was die 400 V stelsel die fokus van die opgradering. Spesifieke invertervoederkroeë is by die bestaande stelsel toegevoeg, gebruik makend van onafhanklike voederkabinette met intelligente gegooide-kas-sirkuitskringers. Die nommerstrooom is gekies tussen 400 A en 630 A, afhangende van belastingvraag, met elektroniese trip-eenhede vir presiese oorkoerent- en short-sirkuitbeskerming. Elke inverterkroei is toegerus met 'n afskakelswitch wat die sirkuitskringer se nommerstrooom pas, en sluit 'n sigbare skakelfunksie in om toerustingonderhoude te vergemaklik.
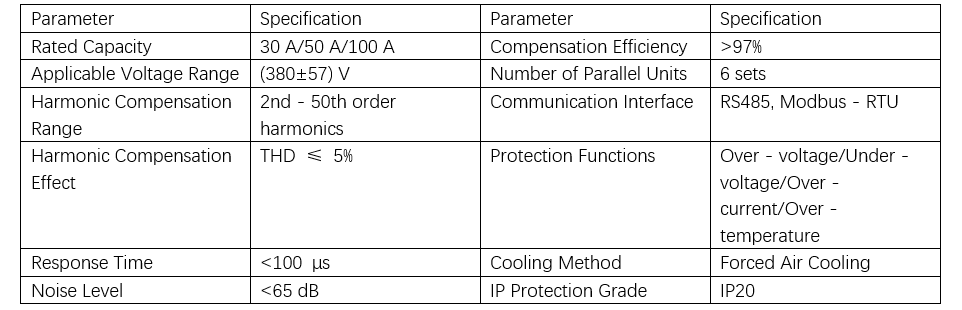
Vir harmonie-vermindering is aktiewe kragfilters (APF) by die inverter-ingangsaantoon geïnstalleer, met spesifieke spesifikasies soos in Tabel 1 gelyst.
Vir die optimering van grondstelsels, het hierdie studie die TN-S bedradingsmetode aangeneem, waarby die neutrale lyn (N) vanaf die verdeelkabinet van die beskermingsaarde lyn (PE) geskei word. Die hoof PE lyn gebruik koper geleiders met 'n doorsnee van minstens 95 mm² om 'n grondweerstand van minder as 1 Ω te verseker. Gelykpotensiaalbindingbalks is by kritiese toerustingposisies soos inverters en motore bygevoeg, gebruik makend van koper geleiders met 'n doorsnee groter as 16 mm². Dit onderdruk effektief gemeenskaplike modus-interferensie en verhoog die stelsel se EMC prestasie [21].
3.2 Keuse en Parameteroptimering van Invertertoerusting
Die keuse van inverters is gebaseer op presiese passing van belastingkenmerke en prosesvereistes. Vir pompbelastings word vektorbeheerinverters gekies, met hul nommerkrag streng ooreenstemmend met dié van die motor, en 'n oorlastkapasiteit van 150%/1 min. Hierdie studie het die ABB ACS880 reeks inverter gekies, wat DTC (Direct Torque Control) tegnologie kenmerk, met 'n koppelreaksietyd van minder as 5 ms en spoedbeheernauwkeurigheid van ±0.01%. Geglysener inverter met 'n IP54 beskermingsgraad is gebruik, toegerus met 'n gedwonge lugkoelstelsel, wat 'n koellugvloei van minstens 1 m³/(min·kW) verseker.
Vir parameteroptimering, is die fokus op die aanpassing van PID-beheerparameters en die gebruik van die self-stellingalgoritme ingebou in die inverter. Deur staprespons-toetsing, word die optimale proporsionale wins Kp, integrale wins Ki, en afgeleide wins Kd outomaties bereken. Die berekeningformule vir die PID-beheerder uittree u(t) is:

Die ingeboude self-stellingalgoritme van die inverter word gebruik om die optimale proporsionale wins Kp (bereik: 0.1–100), integrale tyd Ti (bereik: 0.1–3600 s), en afgeleide tyd Td (bereik: 0–10 s) deur 'n staprespons-toets automaats te bereken. Versnellingstyding is ingestel op 10–30 s en afremmingstyding op 15–45 s om waterhamereffect effektief te verhoed. Koppellimieting is aktiveer met 'n instelling van 120% van die motor se nommerkoppel om oorlast te verhoed. Vir waaiervraag, word die inverter se energiebesparingmodus geaktiveer: onder ligbelastings (belastingskoers < 50%), word die uitgangspanning outomaties verlaag, met 'n maksimum vermindering van tot 20%. Tegelykertyd word die V/F-kromme geoptimeer deur die spanningsuitgang in die laagspoedbereik (0–10 Hz) te verhoog om voldoende startkoppel te verseker.
'n Slaap-wake funksie is geconfigureer: wanneer die werkfrekwensie langer as 60 s onder 10 Hz bly, gaan die inverter in slaapmodus; dit word outomaties wakker wanneer die stelseldruk met 5% daal, wat die stelsel se doeltreffendheid verder verbeter. In die basiese inverterinstellings, is die draaierfrekwensie ingestel op 4 kHz. Gebaseer op die werklike vereistes van die kragstasie, is die oorspanning en onderspanning beskermingdrempels ingestel op 418 V en 304 V, onderskeidelik. Verder is die motor se nommerparameters en meervoudige spoedbedryf-instellings soos in Tabel 2 gedetailleer.

Die berekeningformules vir stroombepaling en minimumstrootoptimering is onderskeidelik as volg:

waar Ilim die maksimum stroombepaling is; In die motor se nommerstrooom is; Ismin die minimum rotorstrooom is; Idopt die optimale opwekkingsstrooom is; en Iq die koppelstrooomkomponent is. Deur stroombepaling en minimumstrootoptimeringstrategieë in te sluit, word fyn-gemoduleerde beheer van motorbedryf bereik. Oorspanning en onderspanning beskermingsinstellings verseker dat die motor binne 'n veilige bereik werk. Stokperd- en stroombepalingmaatreëls verhoed effektief oorlast. Bovendien ondersteun hierdie beheermetode kommunikasie via die Modbus-RTU protokol, wat afstand-monitering en -parameteraanpassing moontlik maak, en dit verhoog aansienlik die stelsel se intelligensievlak.
3.3 Beheerstelsel Opgradering en Integrering
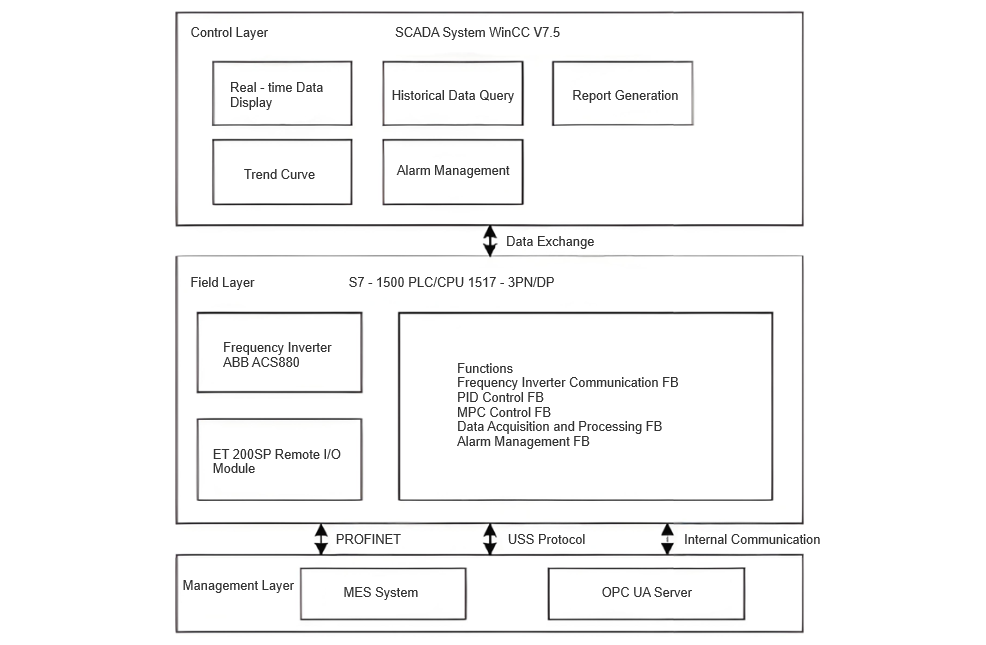
Die beheerstelselopgradering maak gebruik van die Siemens S7-1500 reeks PLC, spesifiek die CPU 1517-3 PN/DP model, wat 'n 2 ns bitbewerkingspoed en 'n 40 ns woordbewerkingspoed kenmerk. Die PLC is toegerus met 1.6 GB werksgeheue en 32 MB laadgeheue, wat kommunikasieprotokolle insluit soos PROFINET, PROFIBUS, en OPC UA. Die stelsel volg 'n verspreide argitektuur met ET 200SP reeks afgeleë I/O-modules, wat 'n 250 μs kommunikasiekring deur PROFINET bereik.
Die sagtewareargitektuur is gebaseer op die TIA Portal V16 geïntegreerde ontwikkelomgewing. Die PLC-program sluit funksieblokke (FBs) in vir inverterkommunikasie, PID-beheer, Model Predictive Control (MPC), data-insamelingvoorverwerking, en alarmbestuur. Die gedetailleerde stelselraamwerk word in Figuur 1 geïllustreer.
4 Energiebesparingseffekte-analise
Die energiebesparingseffekte van inverter-spoedbeheertegnologie word hoofsaaklik weerspieël in verminderde kragverbruik en verbeterde stelseldoeltreffendheid. Deur die energieverbruikdata voor en ná die opleiding te vergelyk, kan die energiebesparingprestasie kwantitatief geëvalueer word. Die stelseldata ná die opleiding in hierdie studie is deur die volgende metodes ingesamel:
Energie Meteringstelsel: Slimmeter is op die kragvoorsieningslyne van belangrike elektriese toerusting geïnstalleer om kragverbruikdata voor en ná die opleiding in te samel. Die metermodel is Schneider PM5560










