Kui tööstliku tootmise süda, elektriautomaatikasüsteemid mõjutavad otse üldist tootmiskulu ja keskkonnamõju. Traditsiooniline pideva kiirusega töö tavaliselt viib energiakaotustele muutuvate laadimise nõudluste reageerimisel ning tekitab raskusi täpse protsessijuhtimise saavutamisel. Muutuvate sageduste kiiruse reguleerimistechnoloogia, kui arenenud mootorijuhtimismeetod, pakub palavast lahendust nende probleemidele. See uuring kasutab elektriautomaatikasüsteemi elektrostoonilises elektrijaamas näidisena, et uurida inverterite kiiruse kontrolli alusel rajatud moderniseerimisskeemi ja selle energiasäästlikku mõju, eesmärgiks on anda viitetähistus sarnaste tööstlike stsenaariumite energiatõhususe parandamiseks.
1 Praegune seis ja inverterite rakendamise moderniseerimise nõuded elektriautomaatikas
1.1 Olemasolev varustus
Elektrijaama elektriautomaatikasüsteem koosneb peamiselt kolmest osast: elektri jagamissüsteem, mootorijuhtimise ühikud ja juhtimissüsteem. Elektri jagamissüsteem sisaldab 10 kV kõrgepinge lüliti, transformaatorit ja 400 V madalpinge lüliti, mis on paigutatud puustruktuuris elektri jagamiseks. Mootorijuhtimine toimub peamiselt asünkroonsete mootoritega, mida juhitakse otsesel või tähe-triidiga vähendatud pingega käivitamise meetodiga. Paigal on suurima osana pompilad, sealhulgas tsirkuleerimispompid, jaheduspompid ja vedelike pompimispompid. Need seadmed töötavad pideva kiirusega, väljavool reguleeritakse ventiilidega, mis viib kõrgele energiatarbimisele. Olemasolev süsteemi arhitektuur on suhteliselt hajus, osaliselt keskpunktistatud. Ülemine järelevalvesüsteem suhtub välijuhtimissüsteemidega tööstliku Etherneti kaudu, lubades andmete kuvamist keskpunktistatult ja kaugtööd. Kuid praegune juhtimissüsteem ei sisalda arenenud algoritme muutuvate sageduste kiiruse reguleerimiseks, mis viib energiahalduse ja protsessioptimiseerimise puudujäägile.
1.2 Moderniseerimise nõuded
Olemasoleva varustuse staatuse põhjal on elektriautomaatikasüsteemi moderniseerimise nõuded esmakordselt energiatõhususe parandamisel ja juhtimise optimiseerimisel. On vaja tuua sisse inverteripõhine kiiruse reguleerimistechnoloogia, et võimaldada pompe ja ventilatoreid tõhusalt töötada, kohandades mootorikiirusi vastavalt laadimise nõudlustele.
Samuti on vaja kasutada olemasolevaid pompiladu ja tootmisobjekte, et kiiresti luua intelligentsed järelevalveplatvorm, mis vastab küberkaitse taseme 2 nõuetele. Pilves arvutamise ja IoT-tehnoloogia integreerimisel võimaldab see platvorm liituühendust ettevõtte halduse ja välijuhtimise vahel. Süsteemi arhitektuur kasutab "keskplatvorm + hajutatud alamsüsteemid + mobiilterminalid" kolmemitte struktuuri, tagades andmete kogumise, tõhusa töötlemise ja turvalise salvestamise reaalsajas.
Keskplatvorm, mis on ehitatud kõrgetehnoloogilise serveriklasteri alusel, kasutab arenenud andmeanalüüsi algoritme, et pakkuda täpset otsustamistoetust. Hajutatud alamsüsteemid sisaldavad varustuse olekujärelevalve, videokontrolli ja keskkonnaparametrite kogumise mooduleid, hõlmades täielikult kõiki tootmisoperatsioone. Mobiilterminalid, kastomiseeritud rakenduste kaudu, võimaldavad kaugjärelevalvet ja kohest teavitamist.
2 Energiasäästu mõju teoreetiline alus
Selles uuringus analüüsitakse inverterite kiiruse reguleerimistechnoloogia energiasäästu mõju, põhinedes eelkõige ventilatoreid ja pompe käsitlevate afiinseaduste ja muutuvate sageduste kiiruse reguleerimise energiaümbritsemise printsiipidel. Varustuse praeguse operatiivse staatuse põhjal töötab suur hulk pompe ja ventilatoreid pideva kiirusega, väljavool reguleeritakse ventiilidega, mis viib oluliste energiakaotusteni. Selle asemel, muutuvate sageduste kiiruse reguleerimine kohandab mootorikiirust vastavalt laadimise nõudlustele, saavutades energiasäästu. Ventilatoreid ja pompe käsitlevad afiinseadused on loodud väljavoolu, hüppetõusu ja võimu vaheliste suhete alusel, relevantne arvutusvalem on järgmine:
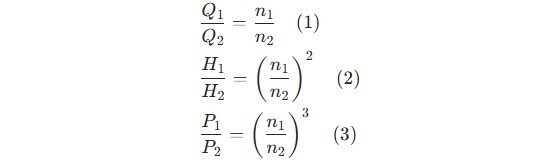
kus Q on väljavool (m3/h); n on kiirus (o/min); H on hüppetõus (m); P on võim (kW), kus P1 esindab niminaalset võimu ja P2 on võim vähendatud kiirusega. Muutuvate sageduste kiiruse reguleerimise energiaümbritsemise valem on:

Ülalmainitud teoreetiliste suhete põhjal, kui süsteemi väljavoolu nõudlus väheneb, siis mootor automaatselt vähendab kiirust sageduse kontrolli kaudu, oluliselt vähendades võimukulumist ja saavutades energiasäästu. See annab teoreetilise aluse järgmisele moderniseerimiskava ja energiasäästu hindamiseks.
3 Inverterite kiiruse reguleerimistechnoloogia moderniseerimisskeem
3.1 Elektri jagamissüsteemi uuendamine
Inverterite kiiruse reguleerimistechnoloogia tõhusaks rakendamiseks on selles uuringus uuendatud olemasolev elektri jagamissüsteem. Kõrgepinge süsteemi jaoks on 10 kV lüliti tugevdatud intellikentidega vakuumlüliti, mille niminaalne vool on vähemalt 1 250 A ja niminaalne lühitingeline katkestusvõime 31,5 kA. Integreeritakse mikroprotsessoripõhised kaitserelid, pakkudes mitme funktsiooniga kaitset, sealhulgas ülevoolu, lühitinge ja maapindade, vastuses alla 20 ms. Toodetakse sisse elektripingvi monitooringusüsteem, kasutades A-kategooria kõrgetäpsuse sensorit, et reaalajas jälgida harmooniate sisalduse, pingevärtsuste ja kolme faasi ebavõrdset pingevälja. See tagab süsteemi stabiilsuse.
Madalpinge süsteemi jaoks oli 400 V süsteem uuenduse fookus. Olemasolevasse süsteemi lisati spetsiaalsed inverterite voogujuhised, kasutades sõltumatuid voogujuhiseid kaapeleid, mis on varustatud intellikentidega valmistatud lülitiku. Niminaalne vool valiti 400 A ja 630 A vahel laadimise nõudluste põhjal, sisaldades elektronilisi lülitikke täpseks ülevoolu ja lühitinge kaitseks. Iga inverterijuhis on varustatud lüliti, mis vastab lülitiku niminaalsele voolule ja sisaldab nähtavat katkestuse omadust, et lihtsustada varustuse hooldust.
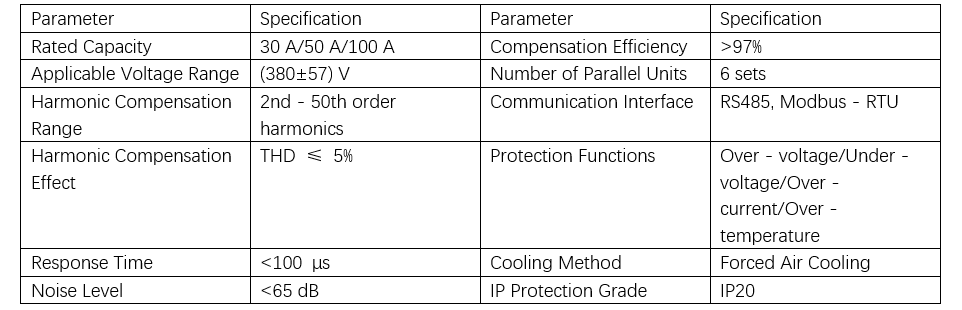
Harmonikute vähendamiseks on inverterite sisendsüsteemile paigaldatud aktiivsed võimsussüsteemid (APF), mille spetsifikatsioonid on loetletud tabelis 1.
Maandussüsteemide optimeerimiseks on see uuring kasutanud TN-S juhendamismeetodit, eraldades neutraaljoon (N) kaitsemaandusjoonest (PE) alates jagamiskaapelest. Peamise PE joon kasutab kupervõtmeketta, mille ristlik pindala on vähemalt 95 mm2, et tagada maandusvastus vähem kui 1 Ω. Kriitiliste seadmete, nagu inverterite ja mootorite, asukohtades on lisatud võrdsed potentsiaalide sidumisribad, kasutades kupervõtmeketta, mille ristlik pindala on suurem kui 16 mm2. See tõhusalt takistab ühisharmonilist interferentsi ja tõstab süsteemi EMC jõudlust [21].
3.2 Inverterite valik ja parameetrite optimeerimine
Inverterite valik põhineb täpsele ladunduse omaduste ja protsessinõudluste sobitamisel. Pompladude jaoks on valitud vektorijuhtimise inverterid, mille niminaalne võim vastab täpselt mootori võimule ja ülevoolvõime on 150%/1 min. Selles uuringus valiti ABB ACS880 serii inverter, mis sisaldab DTC (Direct Torque Control) tehnoloogiat, torquereaktioni aeg on vähem kui 5 ms ja kiiruse kontrolli täpsus on ±0,01%. Arvestades paigal oleva keskkonna, kasutati IP54 kaitseklassi sulgitud inverterit, millel on sundlik õhukuulsüsteem, tagades külmuse õhuvoolu vähemalt 1 m3/(min·kW).
Parameetrite optimeerimiseks on fookus PID juhtimisparameetrite kohandamisel ja inverteri sisseehitatud automaatse sintoniseerimise algoritmi kasutamisel. Lõiguse reaktiivsusproovide kaudu leitakse optimaalne proportsionaalne tõukefaktor Kp, integraalne tõukefaktor Ki ja diferentsiaalne tõukefaktor Kd automaatselt arvutatakse. PID juhtimisväljund u(t) arvutusvalem on:

Inverteri sisseehitatud automaatse sintoniseerimise algoritm kasutatakse, et automaatselt arvutada optimaalne proportsionaalne tõukefaktor Kp (vahemik: 0,1–100), integraalne aeg Ti (vahemik: 0,1–3600 s) ja diferentsiaalne aeg Td (vahemik: 0–10 s) lõiguse reaktiivsusproovi kaudu. Kiirendusaeg on seatud 10–30 s ja aeglustusaeg 15–45 s, et efektiivselt vältida vesikomplekti efekti. Torqupiirang on lubatud, seatud 120% mootori niminaalsest torquist, et vältida ülevoolu. Ventilatoreid jaoks on aktiviseeritud inverteri energiasäästlik režiim: valguse ladunduse tingimustes (ladunduse määr < 50%) on väljundpinge automaatselt vähendatud, maksimaalselt 20%. Samuti on optimiseeritud V/F kõver, suurendades väljundpinget madala kiiruse piirkonnas (0–10 Hz), et tagada piisav käivitusmoment.
Konfigureeritakse magamise ja ärkamise funktsioon: kui töötingimuslik sagedus jääb allapoole 10 Hz 60 sekundi jooksul, siis inverter läheb magama; see automaatselt ärkab, kui süsteemi rõhk langab 5%, edendades süsteemi tõhusust. Põhiline inverteri seadistus on seatud taara frequencyks 4 kHz. Elektrijaama tegelike nõuetega arvestades on ülepinge ja allapinge kaitsepiirid seatud vastavalt 418 V ja 304 V. Lisaks on konfigureeritud mootori niminaalsed parameetrid ja mitmesagedusseadistused, kui tabelis 2.

Voolu piiramise ja minimaalse voolu optimeerimise arvutusvalemite on vastavalt järgmised:

kus Ilim on maksimaalne voolu piirang; In on moatori niminaalvool; Ismin on minimaalne statorivool; Idopt on optimaalne veendusvool; ja Iq on torqukomponent. Voolu piiramise ja minimaalse voolu optimeerimise strateegiate kasutamisel saavutatakse mootori töö fineeritud juhtimine. Ülepinge ja allapinge kaitse seadistused tagavad, et mootor töötab ohutu ulatuses. Stalloon kaitse ja voolu piiramise meetmed tõhusalt vältivad ülevoolu. Lisaks toetab see juhtimismeetod kommunikatsiooni Modbus-RTU protokolli kaudu, võimaldades kaugjärelevalvet ja parameetrite kohandamist, seega tõhusalt tõstes süsteemi intelligentsustase.
3.3 Juhtimissüsteemi uuendamine ja integreerimine
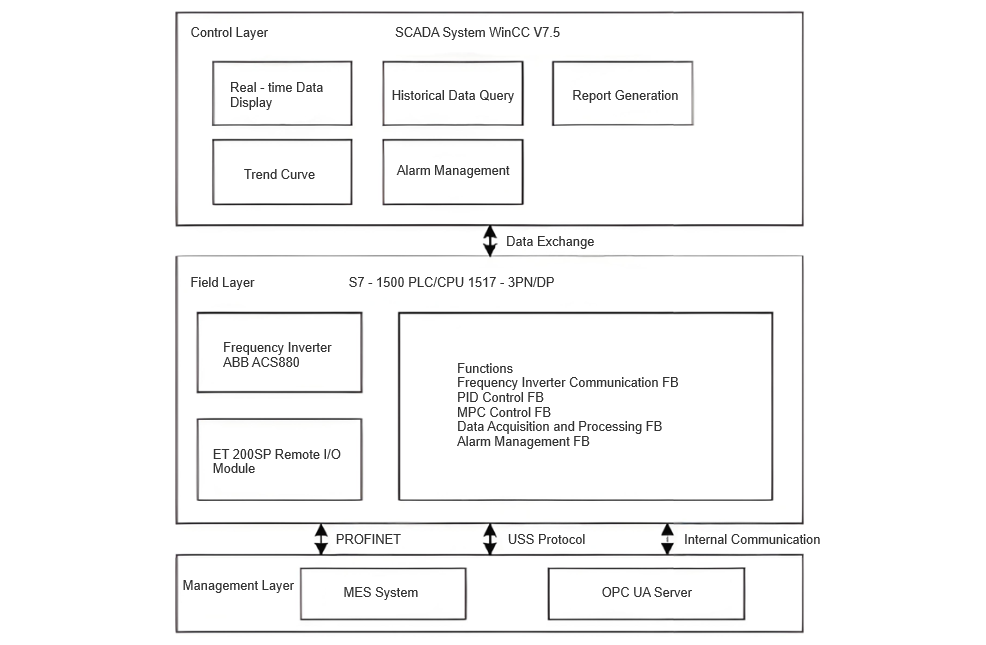
Juhtimissüsteemi uuendamisel kasutatakse Siemensi S7-1500 serii PLC-d, konkreetsemalt CPU 1517-3 PN/DP mudelit, mis sisaldab 2 ns biti töökiirust ja 40 ns sõna töökiirust. PLC-l on 1,6 GB töömuuturi ja 32 MB laadimismuuturi, toetades kommunikatsiooniprotokolle PROFINET, PROFIBUS ja OPC UA. Süsteem kasutab hajutatud arhitektuuri ET 200SP serii kaug-I/O moodulitega, saavutades 250 µs kommunikatsioonitsükli PROFINETi kaudu.
Tarkvara arhitektuur on põhine TIA Portal V16 integratsioonil. PLC programmeerimine sisaldab funktsiooniplokke (FB) inverterite kommunikatsiooniks, PID juhtimiseks, Model Predictive Control (MPC) jaoks, andmekogumiseks eeltöötluseks ja häirehalduseks. Detailne süsteemi raamistik on illustreeritud Joonis 1.