1 ಟೆಸ್ಟರ್ ಪವರ್ ಸಪ್ಲೈನ ಹಾರ್ಡ್ವೆಯರ್ ಡಿಸೈನ್
ಈ ಉಪಕರಣವು ಪ್ರತಿಯೊಂದು ಆವಶ್ಯಕ ಆವರ್ತನ ಮತ್ತು ಪ್ರದೇಶ ಕೋನದ ಲಘು-ಪ್ರವಾಹ ಚಿಹ್ನೆಗಳನ್ನು ಉತ್ಪಾದಿಸಲು ಒಂದು ಪ್ರಮಾಣಿತ ಚಿಪ್ ಪ್ರವಾಹ ಉತ್ಪಾದನ ಉಪಕರಣವನ್ನು ಬಳಸುತ್ತದೆ. ನಂತರ, ವಿಸ್ತರಣ ಸರ್ಕಿಟ್ ಮತ್ತು ಪ್ರದೇಶ ಮಾರ್ಪಾಡು ಸರ್ಕಿಟ್ ಮೂಲಕ, ಪ್ರಾಚಲ ಶಕ್ತಿ ಉತ್ಪಾದಿಸಲು ಅದನ್ನು ಉಪಯೋಗಿಸಲಾಗುತ್ತದೆ.
1.1 ಪವರ್ ಫ್ರೀಕ್ವಂಸಿ ಸೈನ್ ವೇವ್ ಲಘು-ಪ್ರವಾಹ ಚಿಹ್ನೆ ಉತ್ಪಾದನ ಉಪಕರಣ
ಸೈನ್ ವೇವ್ ಜನರೇಟಿಂಗ್ ಸರ್ಕಿಟ್ ಮೂಲತಃ ಅಮೆರಿಕದ ಎಂಕ್ಸಿಎಂ ಕಂಪನಿಯಿಂದ ಉತ್ಪಾದಿಸಲಾದ ಮ್ಯಾಕ್ಸ್038 ವೇವ್ಫಾರ್ಮ್ ಜನರೇಟಿಂಗ್ ಚಿಪ್ ಮೂಲಕ ರಚಿಸಲಾಗಿದೆ. ಪರೀಕ್ಷೆಯ ಆವಶ್ಯಕತೆಗಳ ಪ್ರಕಾರ, ಈ ಸರ್ಕಿಟ್ ಗೆ ಮೂರು ಚಿಪ್ಗಳು ಆವಶ್ಯತೆಯಿದ್ದು ಕೆಳಗಿನ ಕನ್ವೆನ್ಷನ್ ಪ್ರಕಾರ ಕನ್ವೆನ್ಷನ್ ಸೈನ್ ಚಿಹ್ನೆಗಳನ್ನು ಉತ್ಪಾದಿಸಬಹುದು. ಮ್ಯಾಕ್ಸ್038 ಒಂದು ಉನ್ನತ ಆವರ್ತನ ದ್ರವ್ಯತ್ವ ಫಂಕ್ಷನ್ ಜನರೇಟರ್ ಆಗಿದೆ. ಸರಳ ಪರಿಪ್ರೇಕ್ಷ್ಯ ಸರ್ಕಿಟ್ ರಚಿಸಿ (ಚಿತ್ರ 1 ನೋಡಿ) ಮತ್ತು ಚಿಪ್ ಪಿನ್ A₀ ಮತ್ತು A₁ ನ್ನು ನಿಯಂತ್ರಿಸಿ (ತಾಲಿಕೆ 1 ನೋಡಿ), ಸೈನ್ ವೇವ್, ರೆಕ್ಟಾಂಗುಲರ್ ವೇವ್ ಮತ್ತು ಟ್ರಾಯಾಂಗುಲರ್ ವೇವ್ ಉತ್ಪಾದಿಸಬಹುದು.
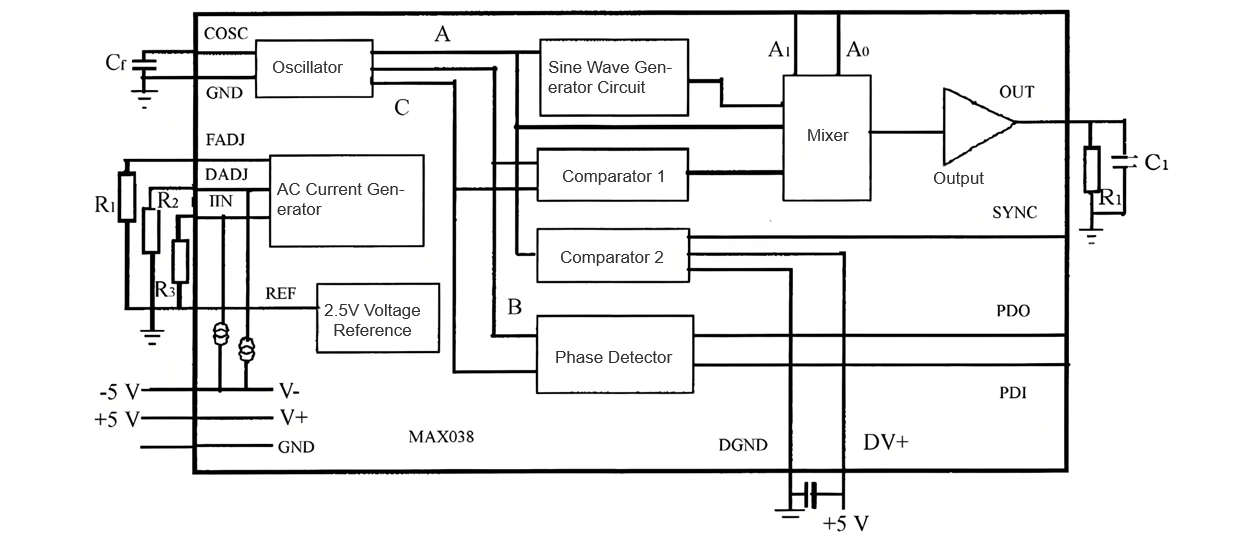
ಆವೃತ್ತಿ ಮಾರ್ಪಾಡು: FADJ ಪಿನ್ ಶೂನ್ಯ ಮಟ್ಟದಲ್ಲಿದ್ದಾಗ, ಔಟ್ಪುಟ ಆವೃತ್ತಿಯನ್ನು ಕೆಳಗಿನ ಸೂತ್ರದಿಂದ ಲೆಕ್ಕ ಹಾಕಬಹುದು Fₐ = IIN / Cf(ಇಲ್ಲಿ IIN= Vref/ Rin; Fₐ ಔಟ್ಪುಟ ಆವೃತ್ತಿಯಾಗಿದೆ, ಮೆಗಾಹೆರ್ಟ್ಸ್ ಯಲ್ಲಿ; Cf ಓಸ್ಸಿಲೇಟರ್ ಬಾಹ್ಯ ಸರ್ಕಿಟ್ ಕ್ಷಮತೆಯಾಗಿದೆ, ಪಿಫ್ ಯಲ್ಲಿ; IIN IN ಪಿನ್ ಔಟ್ಪುಟ ಪ್ರವಾಹವಾಗಿದೆ, ಮೈಕ್ರೋ ಐಂಪಿಯರ್ ಯಲ್ಲಿ; Vref REF ಪಿನ್ ಔಟ್ಪುಟ ವೋಲ್ಟೇಜ್ ಆಗಿದೆ; Rin IN ಪಿನ್ ಇನ್-ಪುಟ ರೋಧವಾಗಿದೆ).

ಡ್ಯುಟಿ ಸೈಕಲ್ ಮಾರ್ಪಾಡು: DADJ ಪಿನ್ ವೋಲ್ಟೇಜ್ ಮಾರ್ಪಾಡು Cf ಕ್ಷಮತೆಯ ಸಾಪೇಕ್ಷ ಚಾರ್ಜಿಂಗ್ ಮತ್ತು ಡಿಸ್ಚಾರ್ಜಿಂಗ್ ದರವನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ. DADJ ಪಿನ್ ಶೂನ್ಯ ಮಟ್ಟದಲ್ಲಿದ್ದಾಗ, ಡುಟಿ ಸೈಕಲ್ 50% ಆಗಿರುತ್ತದೆ. DADJ ಪಿನ್ ವೋಲ್ಟೇಜ್ -2.3~2.3 V ಮಧ್ಯ ಬದಲಾಗಿದ್ದಾಗ, ಡುಟಿ ಸೈಕಲ್ 85%~15% ಮಧ್ಯ ಬದಲಾಗುತ್ತದೆ. ಡುಟಿ ಸೈಕಲ್ ಮಾರ್ಪಾಡನ್ನು ಕೆಳಗಿನ ಸೂತ್ರದಿಂದ ಲೆಕ್ಕ ಹಾಕಬಹುದು Vdadj =₋50%- DC×0.0575 (ಇಲ್ಲಿ Vdadj DADJ ಪಿನ್ ವೋಲ್ಟೇಜ್ ಆಗಿದೆ).
1.2 ಲಘು-ಪ್ರವಾಹ ಚಿಹ್ನೆಗಳ ಏಕ-ಪ್ರದೇಶ, ಮೂರು-ಪ್ರದೇಶ ಮತ್ತು ಎರಡು-ಪ್ರದೇಶ ಲಂಬ ಔಟ್ಪುಟ ಪ್ರತಿಫಲಿಸುವುದು
ಮ್ಯಾಕ್ಸ್038 ಯ ಅಂತರ್ನಿರ್ಮಿತ ಪ್ರದೇಶ ಡಿಟೆಕ್ಟರ್ ಪ್ರದೇಶ ಲಾಕ್ ಲೂಪ್ ಸರ್ಕಿಟ್ ರಚಿಸಲು ಬಳಸಬಹುದು. ಮೂರು ಮ್ಯಾಕ್ಸ್038 ಗಳ PDI ಟರ್ಮಿನಲ್ ಗಳಿಗೆ ಮೂರು-ಪ್ರದೇಶ ರೆಕ್ಟಾಂಗುಲರ್ ವೇವ್ ಚಿಹ್ನೆಗಳನ್ನು ಇನ್-ಪುಟ ಮಾಡಿದಾಗ, ಅವು ಮೂರು-ಪ್ರದೇಶ AC ಚಿಹ್ನೆಗಳನ್ನು ಔಟ್ಪುಟ ಮಾಡುತ್ತವೆ. ಏಕ-ಪ್ರದೇಶ ಚಿಹ್ನೆ ಔಟ್ಪುಟಕ್ಕೆ, ಎರಡು ಸೈನ್ ವೇವ್ ಚಿಹ್ನೆ ಜನರೇಟರ್ ಗಳನ್ನು ಬಂದು ಮೂರನೇ ಸೈನ್ ವೇವ್ ಜನರೇಟರ್ ಮಾತ್ರ ಪ್ರಯೋಗಿಸಬಹುದು.
PDI ಗೆ ಪ್ರದೇಶ ಮಾರ್ಪಾಡು ಚಿಹ್ನೆಗಳನ್ನು ಇನ್-ಪುಟ ಮಾಡುವ ಅಗತ್ಯವಿಲ್ಲ. ಎರಡು-ಪ್ರದೇಶ ಲಂಬ ಔಟ್ಪುಟ ಪ್ರತಿಫಲಿಸುವ ತತ್ತ್ವವು ಮೂರು-ಪ್ರದೇಶ ಔಟ್ಪುಟ ಪ್ರತಿಫಲಿಸುವ ತತ್ತ್ವಕ್ಕೆ ಸಮಾನವಾಗಿದೆ. ಮೊದಲು, ಒಂದು ಸೈನ್ ವೇವ್ ಚಿಹ್ನೆ ಜನರೇಟರ್ ನ್ನು ಬಂದು, ಉಳಿದ ಎರಡು ಸೈನ್ ವೇವ್ ಚಿಹ್ನೆ ಜನರೇಟರ್ ಗಳ PDI ಟರ್ಮಿನಲ್ ಗಳಿಗೆ ಎರಡು ಲಂಬ ರೆಕ್ಟಾಂಗುಲರ್ ವೇವ್ ಚಿಹ್ನೆಗಳನ್ನು ಇನ್-ಪುಟ ಮಾಡಿ. ಅವು ಎರಡು-ಪ್ರದೇಶ ಲಂಬ AC ಚಿಹ್ನೆಗಳನ್ನು ಔಟ್ಪುಟ ಮಾಡುತ್ತವೆ. ಈ ರೆಕ್ಟಾಂಗುಲರ್ ಬಾಹ್ಯ ಸಂಪರ್ಕ ಚಿಹ್ನೆಗಳನ್ನು ಪ್ರೋಗ್ರಾಮ್ ಚಾಲಿತ PLD ಮಾಡಿಕೊಂಡು ಪ್ರಯೋಗಿಸಲಾಗಿದೆ. ಮೂರು-ಪ್ರದೇಶ ಪವರ್ ಫ್ರೀಕ್ವಂಸಿ ಸ್ಕ್ವೇರ್ ವೇವ್ ಚಿಹ್ನೆಗಳನ್ನು 6 ಅವಸ್ಥೆಗಳನ್ನಾಗಿ ವಿಭಾಗಿಸಿ (ಚಿತ್ರ 2 ನೋಡಿ).
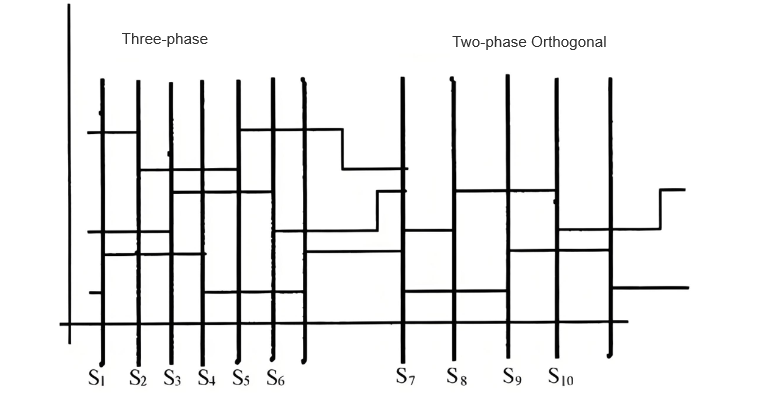
ಇದರಿಂದ ಪ್ರತಿಯೊಂದು ಅವಸ್ಥೆಯ ನಡುವಿನ ಸಮಯ ವ್ಯತ್ಯಾಸ 3.3 ms (50 Hz ಯಲ್ಲಿ 20 ms ಚಕ್ರ ಸಮಯ). 6 ಔಟ್ಪುಟ ಅವಸ್ಥೆಗಳು ಪ್ರತಿಯೊಂದು 3.3 ms ಸಾಗಿ ಮತ್ತು ಅನಂತ ಸಂಖ್ಯೆಯ ಚಕ್ರಗಳಲ್ಲಿ ಧನಾತ್ಮಕ ಕ್ರಮದಲ್ಲಿ ಪುನರಾವರ್ತನೆ ಮಾಡಿದಾಗ, ಪವರ್ ಫ್ರೀಕ್ವಂಸಿ ಮೂರು-ಪ್ರದೇಶ ಸ್ಕ್ವೇರ್ ವೇವ್ ಚಿಹ್ನೆಗಳನ್ನು ಔಟ್ಪುಟ ಮಾಡಬಹುದು. ಅದೇ ರೀತಿ, ಎರಡು-ಪ್ರದೇಶ ಲಂಬ ಚಿಹ್ನೆಗಳನ್ನು ಪ್ರೋಸೆಸ್ ಮಾಡಿ, ಅವನ್ನು 4 ಅವಸ್ಥೆಗಳನ್ನಾಗಿ (S₇, S₈, S₉, S₁₀) ವಿಭಾಗಿಸಿ. ಪ್ರತಿಯೊಂದು ಅವಸ್ಥೆಯ ನಡುವಿನ ಸಮಯ ವ್ಯತ್ಯಾಸ 5 ms. 4 ಔಟ್ಪುಟ ಅವಸ್ಥೆಗಳು ಪ್ರತಿಯೊಂದು 5 ms ಸಾಗಿ ಮತ್ತು ಅನಂತ ಸಂಖ್ಯೆಯ ಚಕ್ರಗಳಲ್ಲಿ ಧನಾತ್ಮಕ ಕ್ರಮದಲ್ಲಿ ಪುನರಾವರ್ತನೆ ಮಾಡಿದಾಗ, ಪವರ್ ಫ್ರೀಕ್ವಂಸಿ ಎರಡು-ಪ್ರದೇಶ ಲಂಬ ಸ್ಕ್ವೇರ್ ವೇವ್ ಚಿಹ್ನೆಗಳನ್ನು ಔಟ್ಪುಟ ಮಾಡಬಹುದು.