
1 ตัวจำกัดกระแสข้อผิดพลาดแบบต้านทานเหนี่ยวนำ
1.1 หลักการการทำงาน
เนื่องจากขนาดของระบบไฟฟ้ากำลังขยายตัวอย่างต่อเนื่อง ความจุของการสั้นวงจรในระบบไฟฟ้าภายในประเทศเพิ่มขึ้นอย่างรวดเร็ว ทำให้เกิดความท้าทายในการสร้างและดำเนินงานของระบบไฟฟ้า การแก้ปัญหาการสั้นวงจรที่เกินไป ตัวจำกัดกระแสข้อผิดพลาดแบบเหนี่ยวนำ (SFCLs) ที่พัฒนาบนหลักการของสมบัติเหนี่ยวนำได้รับความสนใจมากขึ้น โดยสามารถแบ่ง SFCLs ออกเป็นประเภทต้านทานและเหนี่ยวนำตามคุณสมบัติในการลดแรงดันเมื่อเปลี่ยนสถานะเป็นความต้านทานสูง
สำหรับตัวจำกัดกระแสข้อผิดพลาดแบบต้านทานเหนี่ยวนำ มีโครงสร้างที่ง่าย ขนาดเล็ก และน้ำหนักเบา พร้อมหลักการการทำงานที่ชัดเจน เมื่อเข้าสู่สถานะความต้านทานสูง ความต้านทานที่ใช้จำกัดกระแสมีการเพิ่มขึ้นอย่างรวดเร็ว ทำให้มีความสามารถในการควบคุมกระแสข้อผิดพลาดที่แข็งแกร่ง นอกจากนี้ ความสามารถของอุปกรณ์สามารถปรับแต่งได้อย่างยืดหยุ่นผ่านการเชื่อมต่อซีรีย์หรือขนานของวัสดุเหนี่ยวนำ ที่สำคัญในช่วงไม่กี่ปีที่ผ่านมา มีการพัฒนาวัสดุเหนี่ยวนำที่ทำงานที่อุณหภูมิห้อง ทำให้ทั้งในทางวิชาการและภาคอุตสาหกรรมมองว่าตัวจำกัดกระแสข้อผิดพลาดแบบต้านทานเหนี่ยวนำเป็นทิศทางหลักในการพัฒนาในอนาคต
กระแสวิกฤต สนามแม่เหล็กวิกฤต และอุณหภูมิวิกฤต เป็นพารามิเตอร์ทางกายภาพที่สำคัญในการกำหนดว่าวัสดุเหนี่ยวนำอยู่ในสถานะเหนี่ยวนำหรือไม่ หากพารามิเตอร์ใด ๆ เกินค่าวิกฤต วัสดุเหนี่ยวนำจะเปลี่ยนจากสถานะเหนี่ยวนำเป็นสถานะควอนเช่น กระบวนการควอนเชนประกอบด้วยสองขั้นตอน: ขั้นแรก สถานะการไหลของฟลักซ์ ตามด้วยสถานะความต้านทานปกติ เมื่อความหนาแน่นของกระแสที่ผ่านวัสดุเหนี่ยวนำเกินความหนาแน่นของกระแสวิกฤต วัสดุเหนี่ยวนำจะเข้าสู่สถานะการไหลของฟลักซ์
โดยที่: E คือความแรงของสนามไฟฟ้า; EC คือความแรงของสนามไฟฟ้าวิกฤต; J คือความหนาแน่นของกระแส; JCT คือความหนาแน่นของกระแสวิกฤต; α คือค่าคงที่; Tt1 และ Tt2 คืออุณหภูมิของวัสดุเหนี่ยวนำในเวลา t1 และ t2 ตามลำดับ; QRS คือความร้อนที่เกิดจากความต้านทาน Rs จาก t1 ถึง t2; QC คือความร้อนที่แลกเปลี่ยนระหว่างวัสดุเหนี่ยวนำกับสภาพแวดล้อมในช่วงเวลา t1–t2; Cm คือความจุความร้อนจำเพาะของวัสดุเหนี่ยวนำ; JCT(77) คือความหนาแน่นของกระแสวิกฤตที่ 77 K (77 K คืออุณหภูมิของสภาพแวดล้อมไนโตรเจนเหลว); TC คืออุณหภูมิวิกฤต; T คืออุณหภูมิของวัสดุเหนี่ยวนำ
ตามสมการ (1) เมื่อความหนาแน่นของกระแส J เพิ่มขึ้น ความแรงของสนามไฟฟ้า E ของวัสดุเหนี่ยวนำจะเพิ่มขึ้นอย่างรวดเร็ว ทำให้ความต้านทานเพิ่มขึ้น ความต้านทานที่เพิ่มขึ้นทำให้เกิดผลทางความร้อน และตามสมการ (2) อุณหภูมิของวัสดุเหนี่ยวนำจะเพิ่มขึ้นตามลำดับ
จากสมการ (3) ทราบว่าการเพิ่มขึ้นของอุณหภูมิทำให้ความหนาแน่นของกระแสวิกฤตลดลง ทำให้ความแรงของสนามไฟฟ้า E เพิ่มขึ้น ทำให้ความต้านทานของวัสดุเหนี่ยวนำเพิ่มขึ้นอย่างต่อเนื่อง เมื่อความต้านทานเพิ่มขึ้น ความร้อนที่เกิดจากวัสดุเหนี่ยวนำจะค่อยๆ สมดุลกับความร้อนที่กระจายไปยังสภาพแวดล้อม และอุณหภูมิจะคงที่ จนถึงสถานะความต้านทานปกติ
1.2 การประยุกต์ใช้ R-SFCL ในระบบ DC ยืดหยุ่น
ในระบบส่งผ่าน DC แบบยืดหยุ่น กระแส DC ขาดการตัดศูนย์ตามธรรมชาติ ครั้งที่เกิดข้อผิดพลาดสั้นวงจร กระแสข้อผิดพลาดจะเพิ่มขึ้นอย่างรวดเร็ว ทำให้เกิดภัยคุกคามต่ออุปกรณ์ไฟฟ้าในระบบ เพื่อให้ระบบมีความน่าเชื่อถือ ต้องมีเบรกเกอร์ที่สามารถแยกสายที่มีข้อผิดพลาดได้อย่างรวดเร็ว ปัจจุบัน เบรกเกอร์ DC ยังไม่ได้ตอบสนองความต้องการในการใช้งานจริงอย่างเต็มที่
เมื่อเกิดข้อผิดพลาดที่ด้าน DC จะมีการทริปเบรกเกอร์ที่ด้าน AC แต่การทำเช่นนี้ทำให้สถานีแปลงไฟฟ้าต้องปิด และอุปกรณ์อิเล็กทรอนิกส์อาจเสียหายจากการไหลของกระแสเกินในช่วงเวลานั้น การป้องกัน DC ต้องเสร็จสิ้นกระบวนการป้องกันทั้งหมดภายในไม่กี่มิลลิวินาที ในขณะที่เวลาปฏิบัติงานที่เร็วที่สุดของเบรกเกอร์ AC คือประมาณ 50 มิลลิวินาที ทำให้ไม่สามารถป้องกันอุปกรณ์อิเล็กทรอนิกส์ในระบบได้อย่างมีประสิทธิภาพ
เทคโนโลยีปัจจุบันทำให้ R-SFCL สามารถเข้าสู่สถานะความต้านทานปกติภายในประมาณ 3 มิลลิวินาที ตัวจำกัดกระแสข้อผิดพลาดแบบต้านทานเหนี่ยวนำสามารถเปลี่ยนสถานะเป็นการจำกัดกระแสได้เร็วกว่าระบบป้องกันแบบรีเลย์ และสามารถเข้าสู่สถานะความต้านทานสูงก่อนการแยกสายข้อผิดพลาด ทำให้สามารถลดกระแสสั้นวงจรได้อย่างมีประสิทธิภาพ
2 ลักษณะข้อผิดพลาด DC ในระบบ DC ยืดหยุ่น
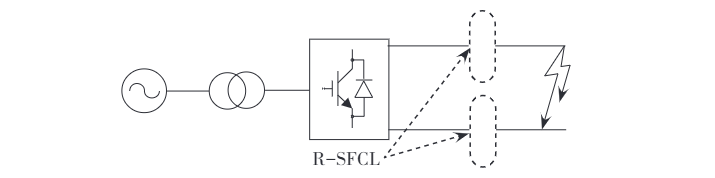
ตำแหน่งของจุดข้อผิดพลาดมีผลต่ออิมพีแดนซ์ของระบบเท่านั้น ไม่ได้ส่งผลต่อเส้นทางของกระแสหรือลักษณะพื้นฐานของข้อผิดพลาดสั้นวงจร เพื่อความสะดวกในการจำลอง จุดข้อผิดพลาดถูกวางไว้ที่จุดกลางของสาย DC และถือว่าเป็นข้อผิดพลาดสั้นวงจรโลหะ โมเดลจำลองระบบ DC แบบยืดหยุ่นสองปลายและโมเดล R-SFCL ถูกสร้างขึ้นโดยใช้ PSCAD/EMTDC ด้วยแรงดันระบบเรตติ้ง ±110 kV และกำลังเรตติ้ง 75 MW ตำแหน่งการติดตั้ง R-SFCL แสดงในรูปที่ 1
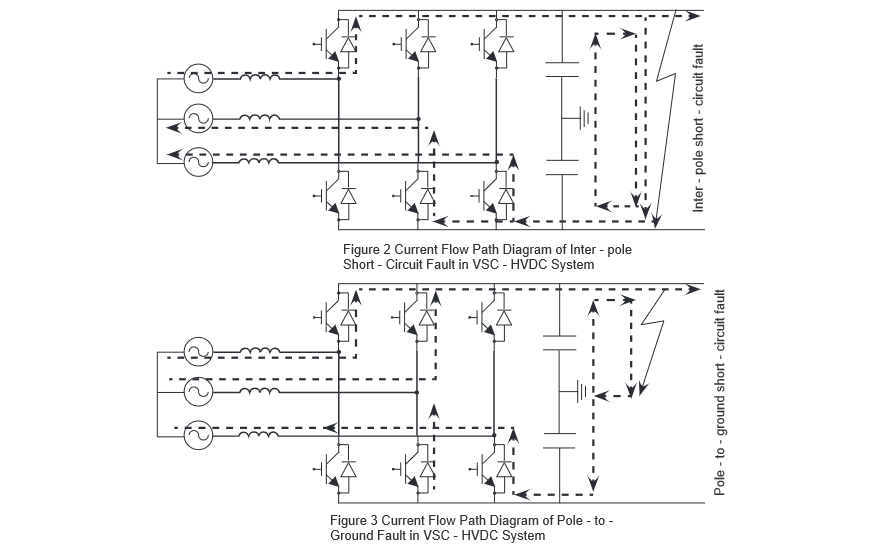
เมื่อเกิดข้อผิดพลาดสั้นวงจร DC IGBT จะถูกตรวจพบและบล็อกโดยทันทีผ่านฟังก์ชันการบล็อกเมื่อตรวจพบกระแสข้อผิดพลาด อย่างไรก็ตาม ไดโอดที่เชื่อมต่อขนานกับ IGBT และสายส่งทำให้เกิดวงจรสะพานที่ไม่สามารถควบคุมได้ ทำให้การคอมมิวเตชันยังคงดำเนินต่อไปแม้ว่า IGBT จะถูกบล็อก ข้อผิดพลาดสั้นวงจร DC ระหว่างขั้วสามารถแบ่งออกเป็นสามระยะ: ระยะแรกเกิดขึ้นทันทีหลังจากข้อผิดพลาด กระแส DC ที่ขั้วฝั่ง DC จะปล่อยพลังงานออกจากคาปาซิเตอร์อย่างรวดเร็ว และกระแส DC จะเพิ่มขึ้นสู่ค่าสูงสุดภายในไม่กี่มิลลิวินาที
ในระยะที่สอง หลังจากแรงดันคาปาซิเตอร์ลดลงเหลือศูนย์ กระแสที่ผ่านไดโอดสามารถเพิ่มขึ้นเป็นสิบเท่าของค่าเรตติ้ง ทำให้อุปกรณ์อิเล็กทรอนิกส์มีโอกาสเสียหายสูง ในระยะที่สาม เมื่อกระแสสั้นวงจร DC ลดลงต่ำกว่ากระแสในระบบ AC ระบบ AC จะเริ่มส่งกระแสสั้นวงจรเข้าสู่จุดข้อผิดพลาด DC ข้อผิดพลาดสั้นวงจรระหว่างขั้วและพื้นไม่มีระยะที่สอง แต่ลักษณะอื่น ๆ จะคล้ายคลึงกับข้อผิดพลาดระหว่างขั้ว
ในระหว่างการส่งกระแสจาก AC กระแสที่ผ่านไดโอดจะประมาณสิบเท่าของค่าเรตติ้ง ทางเดินของกระแสสำหรับสองประเภทของข้อผิดพลาดสั้นวงจร DC ในระบบ DC แบบยืดหยุ่นแสดงในรูปที่ 2 และรูปที่ 3 ตามลำดับ การติดตั้ง R-SFCL ตามทางเดินของกระแสข้อผิดพลาดสามารถเพิ่มความต้านทานของวงจรสั้นวงจรได้อย่างรวดเร็ว ทำให้มีเวลาในการแยกสายข้อผิดพลาดมากขึ้น และลดความต้องการในระยะเวลาเปิดและการตัดกระแสของเบรกเกอร์ DC
3 การวิเคราะห์จำลอง
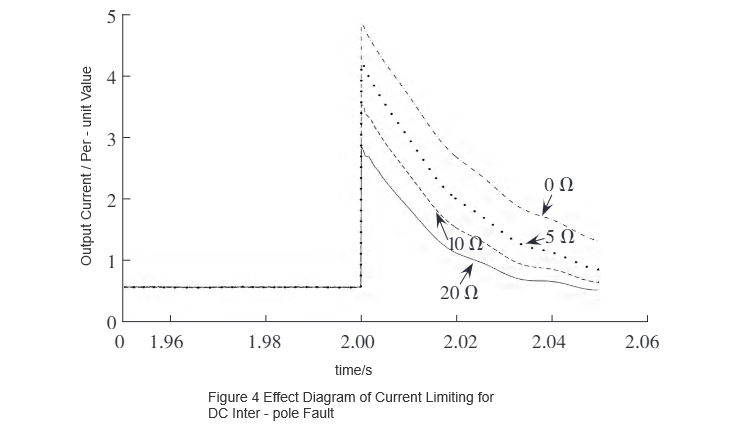
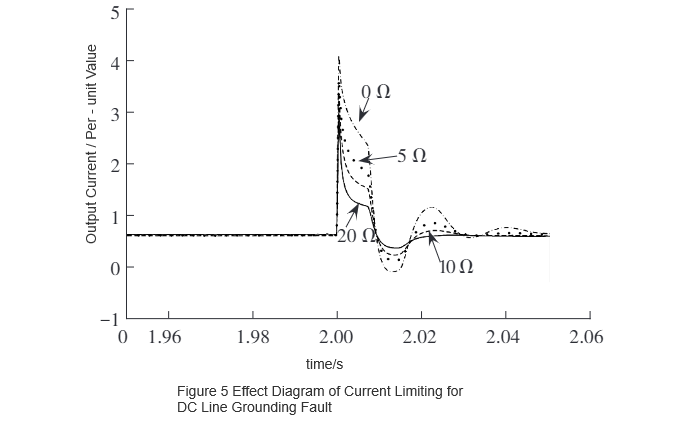
โดยใช้ซอฟต์แวร์จำลอง PSCAD/EMTDC โมเดล R-SFCL ที่พัฒนาขึ้นถูกรวมเข้ากับโมเดลจำลองระบบ DC แบบยืดหยุ่นสองปลายที่มีกำลัง 75 MW เพื่อตรวจสอบ สมรรถนะในการจำกัดกระแสภายใต้ข้อผิดพลาดสั้นวงจรระหว่างขั้ว DC แสดงในรูปที่ 4 และภายใต้ข้อผิดพลาดสั้นวงจรระหว่างสาย DC กับพื้นแสดงในรูปที่ 5 จากรูปที่ 4 และรูปที่ 5 สามารถเห็นได้ว่าค่าสูงสุดของกระแสข้อผิดพลาดลดลงเมื่อความต้านทานในสถานะปกติเพิ่มขึ้น ชัดเจนว่าความต้านทานของ R-SFCL และค่าสูงสุดของกระแสข้อผิดพลาดหลังการติดตั้งมีความสัมพันธ์เชิงฟังก์ชันที่ลดลง
เพื่อขยายขอบเขตการใช้งาน โมเดลเดิมถูกขยายขึ้นตามกำลังระบบสามระดับ: 75 MW, 150 MW, และ 300 MW ภายใต้เงื่อนไขข้อผิดพลาดสั้นวงจรระหว่างขั้ว DC และข้อผิดพลาดสั้นวงจรระหว่างสาย DC กับพื้น ความสัมพันธ์ระหว่างค่าความต้านทานในสถานะปกติของ R-SFCL และค่าสูงสุดของกระแสสั้นวงจรถูกศึกษาโดยการหาค่าสูงสุดของกระแสสั้นวงจร ผลลัพธ์แสดงในรูปที่ 6 และรูปที่ 7
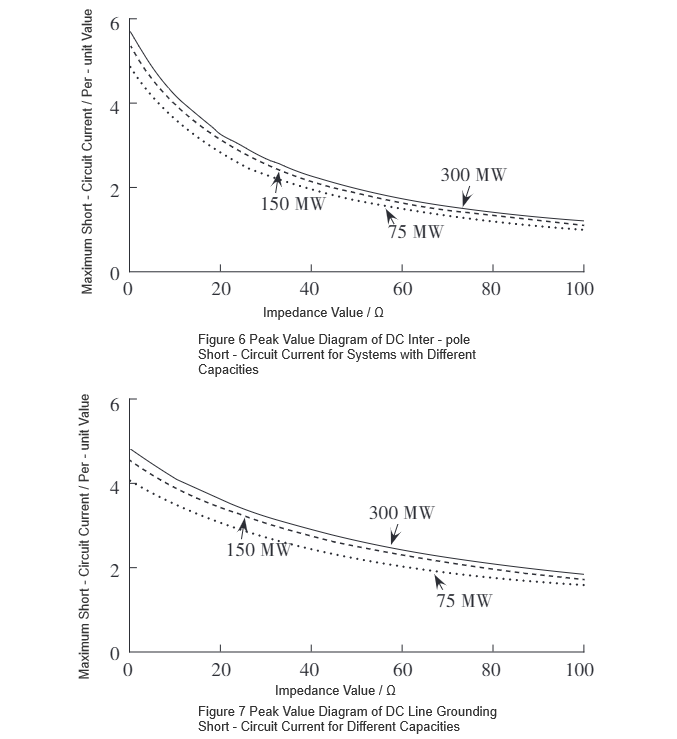
โดยใช้ฟังก์ชันการปรับโค้งใน MATLAB โค้งในรูปที่ 6 และรูปที่ 7 ถูกปรับให้เหมาะสม ทำให้ได้ฟังก์ชันในรูปแบบ f(x) = ae⁻ᵇˣ + c ด้วยพารามิเตอร์เฉพาะที่ระบุในตารางที่ 1 การหาอนุพันธ์ของฟังก์ชันที่ปรับให้เหมาะสมได้ f'(x) = -abe⁻ᵇˣ จากตารางที่ 1 สามารถเห็นได้ว่าสำหรับข้อผิดพลาดประเภทเดียวกัน พารามิเตอร์ b ยังคงค่าคงที่ ส่วนพารามิเตอร์ a เพิ่มขึ้นตามกำลังระบบ เนื่องจาก b มีค่าน้อย ความชันของโค้งสำหรับข้อผิดพลาดประเภทเดียวกันจะเกือบเหมือนกันดังนั้น R-SFCL ที่มีความต้านทานในสถานะปกติเดียวกันจะมีอัตราการเปลี่ยนแปลงของค่าสูงสุดของกระแสข้อผิดพลาดที่เหมือนกันในระบบต่าง ๆ สำหรับข้อผิดพลาดประเภทเดียวกัน แสดงถึงสมรรถนะในการจำกัดกระแสที่คงที่
นอกจากนี้ เมื่อความต้านทานในสถานะปกติของ R-SFCL เพิ่มขึ้นอย่างเชิงเส้น ประสิทธิภาพในการจำกัดกระแสจะค่อย ๆ ลดลง ตามความชันของโค้งในรูปที่ 6 และรูปที่ 7 ช่วงความต้านทานในสถานะปกติที่เหมาะสมที่สุดของ R-SFCL ในการลดค่าสูงสุดของกระแสข้อผิดพลาดอย่างมีประสิทธิภาพคือ 0–10 Ω
4 สรุป
การติดตั้ง R-SFCL ที่ด้านเอาต์พุต DC ของสถานีแปลงไฟฟ้าในระบบส่งผ่าน DC แบบยืดหยุ่นสามารถลดกระแสข้อผิดพลาดสั้นวงจร DC ได้อย่างมีประสิทธิภาพ เมื่อความต้านทานของ R-SFCL เพิ่มขึ้นอย่างเชิงเส้น ประสิทธิภาพในการจำกัดกระแสมีแนวโน้มลดลง ด้วยการพิจารณาสถานะการวิจัยปัจจุบัน ต้นทุนทางวิศวกรรม และความต้องการพื้นที่ แนะนำว่าช่วงความต้านทานในสถานะปกติที่เหมาะสมที่สุดสำหรับ R-SFCL คือ 0–10 Ω










