స్మార్ట్ గ్రిడ్లకు నియంత్రణ యోగ్య రియాక్టర్ల నిర్మాణ విధానం మరియు అనువర్తనం

రియాక్టర్లు పవర్ సిస్టమ్లలో రియాక్టివ్ పవర్ కంపెన్సేషన్కు ముఖ్యమైనవి, మాగ్నెటిక్ నియంత్రిత రియాక్టర్లు పరిశోధన ఫోకస్. అడ్వాన్స్డ్ టెక్నోలజీతో ప్రధాన గ్రిడ్ని అప్గ్రేడ్ చేసే స్మార్ట్ గ్రిడ్, భద్రత మరియు విశ్వాసక్కారంను పెంచుతుంది, ఈదాని ద్వారా నియంత్రిత రియాక్టర్ల పై డమండ్ పెరిగింది. కాబట్టి, కొత్త రకాల రియాక్టర్ల వికాసం ముఖ్యం. ఈ పేపర్, ప్రాక్టీస్ తో కలిసి, వాటి నిర్మాణ మరియు అనువర్తనంపై ప్రభావం చేస్తుంది, ఇది స్మార్ట్ గ్రిడ్ నిర్మాణాన్ని ప్రోత్సహిస్తుంది.
1 నియంత్రిత రియాక్టర్ల పన్నులు మరియు అనువర్తన స్థితి
1.1 పన్నులు
గ్రిడ్లకు, నియంత్రిత రియాక్టర్లు నెట్వర్క్ లాస్సీస్ను తగ్గిస్తాయి, పవర్ ఫ్యాక్టర్ను 0.9 కంటే ఎక్కువ చేస్తాయి, ఒస్సిలేషన్లను తగ్గిస్తాయి, డ్యామ్పింగ్ లిమిట్లను విస్తరిస్తాయి, ట్రాన్స్మిషన్ క్షమతను పెంచుతాయి, మరియు వోల్టేజ్ స్థిరతను పెంచుతాయి. ఉపయోక్తలకు, వారు: ① వోల్టేజ్ను స్థిరం చేస్తాయి, ట్రాన్స్ఫార్మర్ల వంటి పరికరాలను సంరక్షిస్తాయి, మరియు సేవా జీవనాన్ని పెంచుతాయి. ② హార్మోనిక్స్ను తొలగిస్తాయి, లాస్సీస్ను తగ్గిస్తాయి, మరియు భద్రతను పెంచుతాయి. ③ వోల్టేజ్ ఫ్లికర్ను తగ్గిస్తాయి, పవర్ గుణమానాన్ని పెంచుతాయి. ④ హెవీ-డెమాండ్ ఉపయోక్తలకు రియాక్టివ్ లాస్సీస్ను తగ్గిస్తాయి, బిల్లు ఖర్చును తగ్గిస్తాయి. ⑤ డైనమిక కంపెన్సేషన్ ద్వారా లావానికి క్షమత విస్తరణను చేసుకోవచ్చు.
1.2 అనువర్తన స్థితి
నియంత్రిత రియాక్టర్లు పవర్ సిస్టమ్లలో, పవర్ యూనిట్లలో, ఔద్యోగిక యూనిట్లలో, కొత్త శక్తి జనరేషన్ మరియు ఇతర రంగాలలో వ్యాపకంగా ఉపయోగించబడతాయి. పవర్ డమాండ్ పెరిగినందున మరియు పవర్ ట్రాన్స్మిషన్ మరియు డిస్ట్రిబ్యూషన్ గ్రిడ్ల అప్గ్రేడ్ చేస్తూ, నియంత్రిత రియాక్టర్ల పై మార్కెట్ డమాండ్ కూడా పెరుగుతోంది.
రియాక్టర్లు మూడు రకాల్లో విభజించబడతాయి: మాగ్నెటిక్ నియంత్రణ, స్విచ్ టాసింగ్, మరియు ఎలక్ట్రానిక్-స్విచ్ నియంత్రణ. మాగ్నెటిక్ నియంత్రణ రియాక్టర్లు నిరంతర నిర్వహణను, పెద్ద క్షమతను, మరియు తక్కువ ఖర్చును అందిస్తాయి, కానీ వాటి ప్రతికృతి చాలా నిదానంగా ఉంటుంది, లాస్సీస్ మరియు హార్మోనిక్స్ చాలా ఉంటాయి. స్విచ్ టాసింగ్ వాటి విబ్రేషన్/హార్మోనిక్స్ను తప్పించుకుంటాయి, కానీ వాటి నిర్వహణ విచ్ఛిన్నంగా ఉంటుంది, వాటి ఉపయోగాన్ని ఎదుర్కొంటాయి. ఎలక్ట్రానిక్-స్విచ్ వాటి నిరంతర నిర్వహణను చేస్తాయి, చాలా వేగంగా ప్రతికృతి ఉంటుంది, కానీ వాటి హార్మోనిక్స్ మరియు చాలా ఖర్చు ఉంటాయి. మాగ్నెటిక్ నియంత్రణ రియాక్టర్లు ఎంచుకోబడతాయి. స్మార్ట్ గ్రిడ్లకు యోగ్యంగా మెటీరియల్ మరియు నిర్మాణ అప్గ్రేడ్ చేయాలి, కొత్త డిజైన్లు అవసరం.

2 స్మార్ట్ గ్రిడ్లలో నియంత్రిత రియాక్టర్ల నిర్మాణ డిజైన్
స్మార్ట్ గ్రిడ్, లేదా గ్రిడ్ 2.0, రెండు దశల కమ్యునికేషన్ నెట్వర్క్లపై ఏర్పడించబడింది. ఇది కొత్త పరికరాలను, టెక్నోలజీను, మరియు విధానాలను ఉపయోగించి గ్రిడ్ భద్రతను, కార్యక్షమతను, పర్యావరణ మైత్రికతను, మరియు ఆర్థికతను పెంచుతుంది, ఉపయోక్తల పవర్ గుణమాన అవసరాలను బాగా తీర్చుతుంది. నియంత్రిత రియాక్టర్లు స్మార్ట్ గ్రిడ్ నిర్మాణంలో ముఖ్యమైనవి. క్షుద్ర కంపాసైట్ మాగ్నెటిక్ మెటీరియల్స్ పై ఆధారపడి వాటి నిర్మాణ డిజైన్ క్రింది విధంగా ఉంటుంది.
2.1 మాగ్నెటిక్ మెటీరియల్స్ ఎంచుకోవడం
నానోకంపాసైట్ మాగ్నెటిక్ మెటీరియల్స్ నానోక్రిస్టల్ హార్డ్ మరియు సాఫ్ట్ మాగ్నెటిక్ ఫేజీల నుండి ఏర్పడించబడతాయి. వాటి గ్రేన్లు పరస్పరం ప్రభావం చూపి, కరెంట్ ఉపరితలంలో కాప్లీడ్ ఎక్స్చేంజ్ ప్రభావాన్ని ఉత్పత్తి చేస్తాయి. మాక్రోస్కోపిక్ విధంగా, ఫేజీ ఇంటర్ఫేస్ల వద్ద, మాగ్నెటిక్ మొమెంట్లు ప్రభావ చేస్తూ ఫీల్డ్లను పునర్వ్యవస్థపరచి, రిమెనెన్స్ను పెంచుతాయి. నియంత్రిత రియాక్టర్లలో: DC వైండింగ్ల వద్ద అప్లై చేస్తే ఎక్సైటేషన్ ఫీల్డ్ ఏర్పడుతుంది, మెటీరియల్ను మాగ్నెటైజ్ చేస్తుంది; AC ఫీల్డ్ మాగ్నెటిజేషన్ను తగ్గిస్తుంది.
మెల్ట్ రాపిడ్ క్వెంచింగ్ ద్వారా తయారు చేయబడిన మెటీరియల్ టెంపరింగ్ ద్వారా దాని మైక్రోస్ట్రక్చర్ను నిర్వహిస్తుంది. ఇది గ్రేన్లను పెంచుతుంది, కోర్సివిటీని తగ్గిస్తుంది, నిర్వహణ అవసరాలను తీర్చుతుంది.
2.2 మొత్తం నిర్మాణ డిజైన్
నియంత్రిత రియాక్టర్ నిర్మాణం టై ఱాడ్స్, ఐరన్ కోర్, క్లాంప్స్, వర్కింగ్ వైండింగ్స్, నియంత్రణ వైండింగ్స్, మరియు నానోకంపాసైట్ మాగ్నెటిక్ మెటీరియల్స్ నుండి ఏర్పడించబడుతుంది. మాగ్నెటిక్ మెటీరియల్స్ మరియు సిలికన్ స్టీల్ షీట్ల నుండి తయారైన ఎక్సైటేషన్ కాలం మధ్యలో ఉంటుంది. వర్కింగ్ వైండింగ్స్ దాని చుట్టూ ఉంటాయి, వాటి బాహ్య లెయర్లు ప్రధాన మాగ్నెటిక్ సర్క్యులిట్లు. నియంత్రణ వైండింగ్ మాగ్నెటిక్ మెటీరియల్స్ చుట్టూ వ్రాయబడుతుంది.
సిద్ధాంతం: సాధారణ గ్రిడ్ పన్ను (హార్మోనిక్ సుప్రెస్షన్/రియాక్టివ్ రిగ్యులేషన్ అవసరం లేని సమయంలో), రియాక్టర్ వోల్టేజ్, కరెంట్, మరియు రియాక్టివ్ పవర్ను గుర్తిస్తుంది. ఈ డేటా నియంత్రణ సిస్టమ్కు వెళుతుంది, గ్రిడ్ స్థితి ముఖ్యమైన విశ్లేషణను చేస్తుంది. హార్మోనిక్ సుప్రెస్షన్ లేదా రియాక్టివ్ రిగ్యులేషన్ అవసరం ఉన్నప్పుడు, నియంత్రణ సిస్టమ్ వైండింగ్ కరెంట్ను నిర్వహిస్తుంది. మాగ్నెటిక్ మెటీరియల్స్ మాగ్నెటైజేషన్ ద్వారా రియాక్టన్స్ మారుతుంది. పారమైటర్లు డిజైన్ స్పెక్స్కు సరిపోయినప్పుడు, వైండింగ్ కరెంట్ను మళ్లీ నిర్వహిస్తే మెటీరియల్స్ జీరో రిమెనెన్స్కు ప్రతిపాదిస్తుంది.
డిజైన్ సర్క్యుయిట్ ప్రకారం, ప్రాథమిక మరియు సెకన్డరీ లీకేజ్ ఫ్లక్స్ను ఉపేక్షించి, మేము ఈ దశలను పొందుతాము:

ఇక్కడ: E1 అనేది W1 యొక్క ప్రభావిత ఇలక్ట్రోమోటివ్ బలం; E2 అనేది W2 యొక్క ప్రభావిత ఇలక్ట్రోమోటివ్ బలం; E3 అనేది W3 యొక్క ప్రభావిత ఇలక్ట్రోమోటివ్ బలం. అతిథికి, T-ప్రకారం సర్క్యుయిట్ ద్వారా నియంత్రిత రియాక్టర్ యొక్క ట్వో-పోర్ట్ నెట్వర్క్ను సమానం చేయవచ్చు, మేము ఈ దశలను పొందుతాము:
 పని పోర్ట్ను శక్తి గ్రిడ్తో సమాంతరంగా కనెక్ట్ చేయడం ద్వారా మరియు U1 ని స్థిరంగా భావించడం ద్వారా, ఈ క్రింది సమీకరణ వ్యవస్థ పొందవచ్చు:
పని పోర్ట్ను శక్తి గ్రిడ్తో సమాంతరంగా కనెక్ట్ చేయడం ద్వారా మరియు U1 ని స్థిరంగా భావించడం ద్వారా, ఈ క్రింది సమీకరణ వ్యవస్థ పొందవచ్చు:
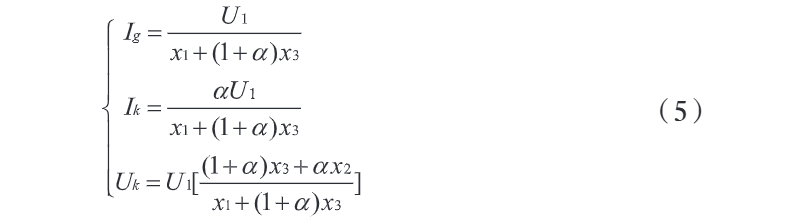
క్రిందివి: Ig మరియు Ik రెండు పోర్ట్లలో ప్రవాహాల ప్రభావ విలువలను సూచిస్తాయి; Uk నియంత్రణ పోర్ట్లో వోల్టేజ్ ప్రభావ విలువను సూచిస్తుంది. ఫార్ములా (5) లోని సమీకరణ వ్యవస్థను పరిష్కరించడం ద్వారా నియంత్రణ రీయాక్టర్కు పని ప్రదర్శన ప్రధాన అంచనాలను పొందవచ్చు.
2.3 నియంత్రణ వ్యవస్థ డిజైన్
నియంత్రణ వ్యవస్థ ప్రధాన సర్క్యూట్ (చౌమక పదార్థం యాదృచ్ఛిక చౌమకత్వాన్ని నియంత్రించడం) మరియు నిరీక్షణ-నియంత్రణ ఉపవ్యవస్థ (విద్యుత్ పారములను నిరీక్షించడం) అనుకూలంగా పనిచేస్తుంది, అది మేనేజ్మెంట్ లక్ష్యాలను చేరువుతుంది. గ్రిడ్ పనికి రీయాక్టెన్స్ నియంత్రణ అవసరం ఉంటే, ప్రధాన సర్క్యూట్ పదార్థాలను చౌమకపరచడం/చౌమకపరచకుండా చేయడానికి ప్రవాహాలను ప్రయోగిస్తుంది, తర్వాత ఉపవ్యవస్థ పారములను ముఖ్యంగా ఉంటూ పారములను నిర్ధారిస్తుంది, గ్రిడ్ స్థిరంగా ఉంటూ ఉంటుంది. రీయాక్టెన్స్ మార్పులు కోర్ చౌమక అవస్థ మార్పుల నుండి వచ్చు. నియంత్రణ ద్వారా రీయాక్టిఫైర్ మిలీసెకన్ స్థాయిలో AC ప్రవాహాన్ని ప్రదానం చేస్తుంది, చౌమక అవస్థ మార్పుల ద్రుత అవసరాలను తీర్చుకుంది. వ్యవస్థ రీయాక్టర్ని హార్మోనిక్స్ నియంత్రించడానికి మరియు పాసీవ్ శక్తి నియంత్రణ చేయడానికి ఆదేశాలను ప్రదానం చేస్తుంది, గ్రిడ్ స్థిరంగా ఉంటుంది.
కార్య ప్రక్రియ: 1) గ్రిడ్ స్థితిని గుర్తించండి, పారములను సేకరించండి, స్థిరంగా ఉందని ముఖ్యంగా చేయండి. 2) వోల్టేజ్ బ్లాంకులు/హార్మోనిక్స్ జరిగినప్పుడు, రీయాక్టర్ నియంత్రణ వ్యవస్థ ఆదేశాలను ప్రదానం చేస్తుంది. 3) ప్రధాన సర్క్యూట్ నియంత్రణం యొక్క ఇండక్టెన్స్ను ప్రదానం చేస్తుంది; పదార్థాలు చౌమకపరచబడతాయి, యాదృచ్ఛిక చౌమకత్వం/కోర్ అవస్థను మార్చడం ద్వారా రీయాక్టర్ ఇండక్టెన్స్ మారుతుంది. 4) మార్పు తర్వాత, పదార్థాలను చౌమకపరచకుండా ఇండక్టెన్స్ను విలోమ చేస్తుంది, రీయాక్టర్ను రిసెట్ చేస్తుంది. మాట్లాబ్ సమీకరణాలు వ్యవస్థ సామర్థ్యాన్ని ధృవీకరించాయి: 15 A చౌమకపరచడానికి ప్రవాహం మరియు 220 V చౌమకపరచకుండా వోల్టేజ్, స్థిరమైన వేవ్ ఫార్మ్స్, చౌమకపరచడానికి/చౌమకపరచకుండా అవసరాలను తీర్చుకుంది.
3 రీయాక్టెన్స్ నియంత్రణ ప్రభావ ప్రయోగాత్మక విశ్లేషణ
రీయాక్టర్ యొక్క రీయాక్టెన్స్ నియంత్రణ ప్రదర్శనను ధృవీకరించడానికి, డిజైన్ మరియు సమీకరణాల ప్రకారం ప్రొటోటైప్ మరియు ఆధారపడిన నియంత్రణ వ్యవస్థను నిర్మించారు. ప్రయోగాలు ఇండక్టెన్స్ విభజన లక్షణాలను విశ్లేషించాయి మరియు గ్రిడ్ శక్తి గుణమైన మార్పులను ముఖ్యంగా చేశాయి.
3.1 నియంత్రణ రీయాక్టర్ యొక్క స్థిరత
ప్రయోగంలో, నియంత్రణ రీయాక్టర్ యొక్క వోల్టేజ్ - ఐంపీడెన్స్ లక్షణా వక్రం మరియు పని ప్రవాహ వక్రం నిర్మించడానికి డేటాను సేకరించారు. ఫలితాలు ఇవి: ① వోల్టేజ్ విలువ పెరిగినప్పుడు, పని వైనింగ్ యొక్క ప్రవాహం పెరుగుతుంది, మరియు రెండు రేఖీయ సంబంధం కలిగి ఉంటాయి, ఇది వివిధ చౌమకపరచడానికి వోల్టేజ్ల వద్ద ఇండక్టెన్స్ విలువ సాపేక్షంగా స్థిరంగా ఉంటుందని సూచిస్తుంది. ② చౌమకపరచడానికి వోల్టేజ్ 0-35 V ఉన్నప్పుడు, ఇండక్టెన్స్ 0.74 H నుండి 0.61 H వరకు తగ్గుతుంది, మరియు ఇండక్టెన్స్ ప్రదానం స్థిరంగా ఉంటుంది, ముఖ్యంగా నియంత్రణ అవసరాన్ని తీర్చుకుంది. చౌమకపరచడానికి వోల్టేజ్ వద్ద ఇండక్టెన్స్ మార్పు టేబుల్ 2 లో చూపబడింది.

ఈ అధ్యయనంలో, నియంత్రణ రీయాక్టర్ యొక్క ఇండక్టెన్స్ విలువ చౌమక పదార్థాల చౌమకపరచడం మరియు చౌమకపరచకుండా చేయడం ద్వారా సాధించబడుతుంది, ఇది పాల్స్ ప్రవాహం మరియు టాక్షనరీ ప్రవాహం ద్వారా నియంత్రణ వైనింగ్లో ప్రవేశించడం ఆధారంగా ఉంటుంది. ఈ పని పని వైనింగ్కు విఘటనలను తీర్చుకుంది. ఈ కోసం, మిక్స్డ్-డోమైన్ ఓసిలస్కోప్ను ఉపయోగించి చౌమక పదార్థాల యొక్క చౌమకపరచడం మరియు చౌమకపరచకుండా చేయడం ద్వారా ప్రవాహ వేవ్ ఫార్మ్స్ సేకరించారు. ఫలితాలు ఇండికేట్ చేస్తాయి కే రీయాక్టర్ ద్రుత ప్రతిసాధన చేస్తుంది, మరియు చౌమకపరచడం పూర్తయిన తర్వాత ప్రవాహ వేవ్ ఫార్మ్ స్థిరంగా ఉంటుంది.
3.2 ఇండక్టెన్స్ విలువ ముఖ్య ఫలితాలు
నియంత్రణ రీయాక్టర్ యొక్క ప్రామాణిక పని ద్వారా, వివిధ చౌమకపరచడానికి వోల్టేజ్ల ప్రకారం పొందిన ఇండక్టెన్స్ విలువలు టేబుల్ 3 లో చూపబడింది. విశ్లేషణ ఇవి: ① రీయాక్టర్ యొక్క ఇండక్టెన్స్ విలువ చౌమక పదార్థం యొక్క యాదృచ్ఛిక చౌమకత్వం మార్పు ప్రకారం స్థిరంగా మారుతుంది. ఇది అర్థం చేస్తుంది కే టాక్షనరీ వోల్టేజ్ యొక్క చాలా తేలికపు మార్పు రీయాక్టర్ యొక్క ఇండక్టెన్స్ విలువను ముఖ్యంగా నియంత్రించవచ్చు. ② చౌమక పదార్థం యొక్క చౌమక అవస్థను స్థిరంగా నియంత్రించడం ద్వారా, నియంత్రణ రీయాక్టర్ ఇండక్టెన్స్ విలువను ముఖ్యంగా మార్చవచ్చు, ఇది పవర్ లైన్ లో పాసీవ్ శక్తిని ముఖ్యంగా నియంత్రించడం చేస్తుంది.

3.3 శక్తి గ్రిడ్ శక్తి గుణమైన మార్పులు
పవర్ వ్యవస్థలో, నియంత్రణ రీయాక్టర్ ఉపయోగం ముందు మరియు తర్వాత ట్రాన్స్ఫార్మర్ యొక్క హై-వోల్టేజ్ వైపు ప్రవాహం మరియు వోల్టేజ్ మార్పులను రికార్డ్ చేశారు, మరియు హార్మోనిక్ లక్షణాలను గమనించారు. ఫలితాలు టేబుల్ 4 లో చూపబడింది. విశ్లేషణ ఇవి: ① నియంత్రణ రీయాక్టర్ ఉపయోగం ముందు, హై-వోల్టేజ్ వైపు ప్రవాహం మరియు వోల్టేజ్ మార్పులు సంక్లిష్టమైనవి, వేవ్ ఫార్మ్స్ సామాన్య లక్షణాలను కలిగి ఉండవు; నియంత్రణ రీయాక్టర్ ఉపయోగం తర్వాత, హై-వోల్టేజ్ వైపు ప్రవాహం మరియు వోల్టేజ్ వేవ్ ఫార్మ్స్ ముఖ్యంగా ఉంటాయి మరియు సామాన్య లక్షణాలను కలిగి ఉంటాయి. ② నియంత్రణ రీయాక్టర్ ఉపయోగం తర్వాత, హార్మోనిక్ శక్తి తగ్గుతుంది, ఏకాకార శక్తి పెరుగుతుంది, మరియు శక్తి గుణమైన ముఖ్యంగా ఉంటుంది.

4 ముగిసి
ముగిసి, రీయాక్టర్లు పవర్ వ్యవస్థలో ముఖ్యమైన పాత్ర పోషిస్తాయి, వోల్టేజ్ నియంత్రణ, హార్మోనిక్స్ నియంత్రణ, ఒసిలేషన్ నియంత్రణ, మరియు పవర్ ఫాక్టర్ పెరుగుతుంది. ప్రయోగించే రకాల మధ్య, త ప్రయోగ ఫలితాలు: ① రియాక్టర్ ద్రుతవంతంగా స్పందన చేస్తుంది, మ్యాగ్నెటైజ్ తర్వాత విద్యుత్ ప్రవాహ వక్రాలు స్థిరంగా ఉంటాయి. ② చిన్న డీసీ వోల్టేజ్ మార్పులు కూడా ఇండక్టెన్స్ను దక్కినంత మార్పు చేయవచ్చు. పదార్థాల మ్యాగ్నెటిక్ అవస్థను శుభ్రంగా నియంత్రించడం ద్వారా, రియాక్టర్ ఇండక్టెన్స్ను వేరుచేస్తుంది, విద్యుత్ లైన్లో రేఖీయ శక్తిని పూర్తి చేయడానికి. ③ ప్రయోగం తర్వాత, ఎత్తన వోల్టేజ్/విద్యుత్ ప్రవాహ వక్రాలు మరియు శక్తి గుణమైన పరిమాణాలు చాలావరకు మెరుగుతాయి, స్మార్ట్ గ్రిడ్ ప్రారంభానికి యోగ్యం. భవిష్యత్తులో, కొత్త పదార్థాలు, టెక్నాలజీలు, మరియు ప్రక్రియలతో, నియంత్రణయోగ్య రియాక్టర్లను స్మార్ట్ గ్రిడ్ అవసరాలకు మరింత యోగ్యంగా మరియు గ్రిడ్ స్థిరంగా పనిచేయడానికి మెరుగుపరచబడతాయి.
సిఫార్సు