
1 Fotodehõbi elektrijaama kabeleid paigaldava ja vedavate ehitustehnoloogia uurimine
1.1 Andmete kogumine
Enne BIM-mudeli loomist kabeleid paigaldamiseks on vaja sügavalt oskata kaasatud seadmete spetsifikatsioonide, ehitusmaterjalide ja töökohtade tingimuste üksikasju, et parandada mudeli ehituse täpsust. Et tagada, et BIM-mudel võiks täpselt kajastada tegelikku töökohta, seisneb põhipunkt andmete täpse kogumine ja sisestamine olulistest seadmetest. Need hõlmavad kabeltrooida täpset mõõdu, jaotuskaadrite üksikasjalikke spetsifikatsioone, kabelite välisdiameetrite mõõtmeid ja juhtmete konkreetsed parameetrid. Nende parameetrite ja kabelimudeli vaheline suhe peaks järgima järgmisi reegleid:

Valemis on P oluliste parameetrite hulk; I kabeli paigaldamismudeli täpsus; f kujutab P-d I-ks; ja g on sätestamisfunktsioon. Täpsete parameetrite saamine mõjutab otse järgmiseid mudelite ehitamist ja praktilisust. Andmete kogumisel on seadmete parameetrid tihedalt seotud. Mis tahes ühe seadme andmete muutus võib käivitada ahela reaktsioone, mis nõuab seotud parameetrite ajakohast muutmist. Seega andmete kogumise etapis peab strateegia paindlikult kohandama töökohtade tingimuste alusel, et tagada andmete kooskõla ja täpsus.
1.2 Kabelimudeli ehitamine
Ehituses moodustavad juhid kabeleid peidelduse järel. Seadmekülgedele kabelite ühendamiseks paigaldatakse ühendite kabelite otsades. Kabeleid kirjeldav geomeetriline mudel on selle ristlõike kesklõigu järgi skaneerimisel saadud koorik. Lihtsustage ristlõiku ringiks (raadius r) ja kasutage R(s) = (d1(s), d2(s), d3(s)) lokaliseerimiseks kesklõigu S lokaalses koordinaadistikus. Kabeleid kirjeldab täpselt parameetriline võrrand, mis kirjeldab kooriku pindade ehitust.
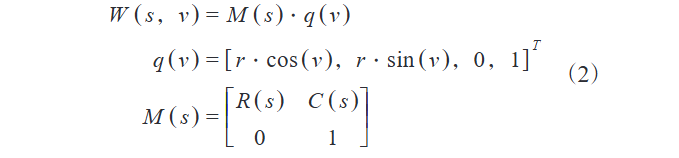
Valemis esindab W lokaalse piirijamatriksi; C(s) globaalset koordinaadiposisiooni punkti; M(s) pööramistransformatsiomatriksi. Sellisel valemil põhineva kabeleid kirjeldava geomeetrilise mudeli näitatakse joonis 1-s.
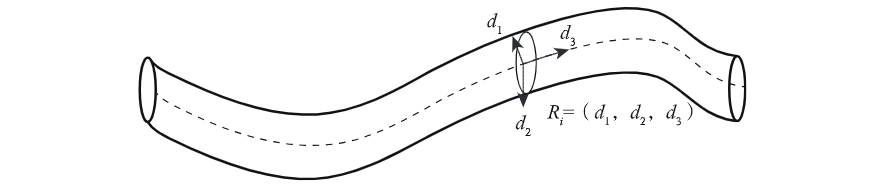
Joonis 1-s märgitakse kabeleid kesklõigu S punase katkeneriga selgesti. S-l asuv punkt q võetakse node'iks, kus luuakse lokaalne koordinaadistik R, et kirjeldada ristlõigu suunalisi omadusi. Konkreetsemalt defineerib d1 (peamise normaali suuna ühikvektor) ristlõigu peamise normaali orientatsiooni; d2 (binormaali suuna ühikvektor, mis on ortogonaalne d1-le) täpsustab suunakeskmist; d3 (S-suunaline ühikvektor) näitab kabeleid q-süvenemise trendi. Ristlõik q-s oletatakse ringiks raadiusega r0, mis koos suunaliste vektoritega moodustab täieliku geomeetrilise mudeli järgmiseks kabeleid instantsianalüüsiks.
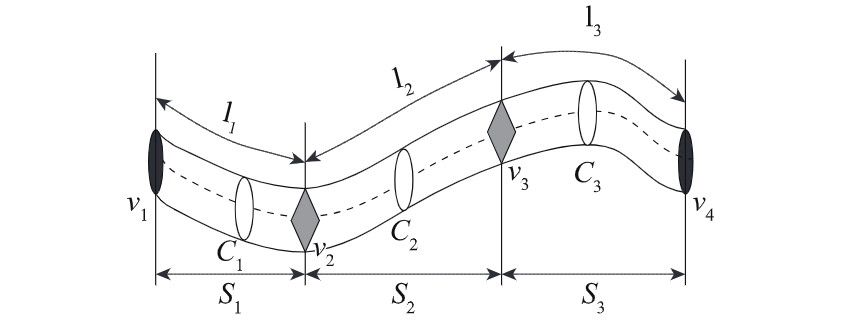
Nagu näha joonis 2-s, defineeritakse kabeleid instantsia nelja tippuga v1–v4, jagamaks seda kolmeks segmendiks l1: v1–v2; l2: v2–v3; l3: v3–v4, kus v1 ja v4 on lõputipud. Igale segmendile määratakse tema asukoht/S-pikkus ja geomeetriline mudel, mille kaudu määratakse ristlõiku suunalised omadused ja vorm. Seega vastavad segmendid l1–l3 ristlõikele C1–C3, moodustades kabeleid geomeetrilise esitysvaate.
1.3 Kabeleid paigaldamine
Joonist 1 ja 2 üksikasjade integreerimine võimaldab täpselt hõlpsasti hõlpsalt kabeleid geomeetrilise modelleerimise ja segmenteerimise omadusi. Mudel kirjeldab täpselt põhigeomeetrilisi elemente (kesklõik, ristlõigu vorm, suunalised atribuudid) ja lubab sügavamat kabeleid analüüsi täpsete segmentide kaudu, pakkudes teoreetilist alust efektiivseks paigaldamiseks.
Paigaldamise eeltööna arvutatakse mudeli põhjal erinevate spetsifikatsioonidega kabeleid kogupikkused. Andmed korraldatakse standardsetesse tabelitesse kabeleid tüübi järgi, pakkudes täpset informatsiooni ja juhiseid ehituseks. Paigaldusmeetodina kasutatakse selles projektis otsest maapanekut, et tagada professionaalsus ja efektiivsus.
Kabeleid paigaldamisel kabeltrooida paigutatakse tasakaalustatud liiv/pue muldas, et säilitada kabeleid paindeva raadius piirides. Kasutatakse elektriliinide vedamiseks elektrokatte. Mitmekordsete kabeleid paigaldades järgitakse täpselt paindeva raadiuspiiranguid:

Valemis esindab rmin kabeleid turvalise paindeva limiidi; cr kabeleid minimaalset turvalist pöördumisraadiust. Kui kabeleid paigaldamine on lõpetatud, tuleb ametlikult esitada taotlus varjatud tööde vastuvõtmiseks projekti kvaliteedi kontrolli vastutavale osakonnale. Kui vastuvõtumenetlus õnnestub, paigutatakse tasakaalustatult liiv kabeleid ümber kui kaitsekihina ja seejärel katab kabeleid kabeleid kate. Lisaks, planeerides kabeleid marsruuti, tuleks prioriteediks panna marsruudi kinnitamine juhib-loodmise lubatud takistuste pinnale:

Valemis on qi konkreetne node kabeleid marsruudi kesklõigu; OS takistuse pinna node; Rr kabeleid raadius; Inter dis punktide vaheline lühim vahemaa. Tagurpidi tippmine enne tagasi tippmist, kontrollida, et kõik varjud tööd vastavad standarditele. Seejärel tippmine tiheda ja stabiilseks, vastavalt spetsifikatsioonidele.
Pitsimise järel paigutatakse suundmärgid olulistesse positsioonidesse (kabeleid ristmikud, ühendused, pöörded). Kabeleid kaitsta kannabasse. Kui otsepanek kabeleid läbib ehitisi, kontrollida välise-sisese putukorguse erinevust; rakendada vesikindlust, kui välised putud on kõrgemad, et tagada paneku ohutus.
1.4 Kabeleid vedamine
Fotodehõbi elektrijaama ehituse oluline samm, kabeleid vedamine peab järgima rangeid spetsifikatsioone/protseduure, et tagada stabiilne, usaldusväärne ja ohutu elektriline ühendus.
Esmalt valmistada täielikud/kvaliteetlikud tööriistad (juhtvedjad, kitsenduspiletid, isolatsioonihüpped, terminaalsed, isolatsioonitaape) ja materjalid. Võta kindlaks, et kabeleid vastavad projekteerimisspetsifikatsioonidele, läbivad kvaliteedikontrolli (puudut ei ole kahjustatud, isolatsioon on terine).
Enne vedamist ehitatakse täpselt kabeleid: kasutatakse juhtvedjaid kabeleid välimise kuju/sisemise isolatsiooni eemaldamiseks vastavalt terminalinõuetele, avastatakse juhid (eemaldatakse terviklikud/oksideed). Valikutegem sobiva terminaali vastavalt juhi ristlõigu ja vedamise vajadustele. Valem on järgmine:

Valemis on T terminali tüüp; A kabeleid juhi ristlõigu pindala; R vedamise parameetrid; S kujutamisfunktsioon. Kasutage kitsenduspiletit, et kitsendada juhid ja terminaalid, tagades, et need pole lahti või ebakindlad. Vedamisel järgige täpselt projekteerimiskeeme ja spetsifikatsioone, et täpselt ühendada kitsendatud terminaalid seadmekaadritega, tagades tihekontakti.
Mitmekordsete kabeleid vedamisel vastavus värvidele/numbritena, et vältida vigased ühendused. Pärast vedamist kattakse ühendused isolatsioonihüpude/taapedega, et tugevdada isolatsiooni ja vältida niiskuse või tolmuga sissepääsu. Kokkuvõttes, kabeleid vedamine on fotodehõbi elektrijaama ehituse kritiline osa, nõudes rangeid spetsifikatsioone, et tagada kvaliteet ja ohutus, luues stabiilseks töötamiseks kindla aluse.
2 Eksperimentaalne analüüs
Fotodehõbi elektrijaama kabeleid paigaldava ja vedava tehnoloogia tõhususe ja sooritatava analüüsi tõendamiseks võrreldakse seda traditsiooniliste meetoditega.
2.1 Eksperimentaalsed objektid
Eksperimendi läbiviidakse laboritoingutes, kasutades MATLAB-i marsruudi planeerimise simulatsiooniks. Valitakse 20 standardiseeritud kabeleid paigaldamise ja vedamise ülesannet, jagatakse 4 gruppi (5 ülesannet igaüks), et vähendada juhuslikke veid, statistilise hajuvuse kaudu, tulemuste stabiilsuse tõstmiseks.
2.2 Eksperimentaalse ettevalmistus
Riistvara hõlmab arvuteid 500GB salvestuse, 32GB mälu ja Windows 10-ga. Need debugitakse ja optimeeritakse, et tagada stabiilne töö, täpne reaalmaailma tingimuste simulatsioon, luues usaldusväärseid tulemusi.
2.3 Eksperimentaalsed tulemused ja analüüs
Võrreldakse kolme meetodit pakutava meetodiga; tulemused on näidatud tabel 1-s.

3 Järeldus
Tabel 1 andmete analüüsimine näitab, et pakutav kabeleid paigaldamise ja vedamise lahendus omab märkimisväärseid eeliseid. Selle marsruudi disain (≈50m) on 40m, 45m ja 50m lühem kui meetodites 1, 2, 3. See tõestab mitte ainult efektiivset marsruudi planeerimist, vaid rõhutab ka suurt rakenduspotentsiaali fotodehõbi elektrijaama projektides, pakkudes väärtuslikke viiteid elektriindustrile.
See artikkel uurib fotodehõbi elektrijaama kabeleid paigaldamist ja vedamist, kasutades BIM-mudelit efektiivsuse ja ohutuse tõstmiseks. Eksperimendid näitavad, et meetod ületab traditsioonilised meetodid marsruudi planeerimises, lühendades marsruuti pikkusi ja parandades kvaliteeti. See toetab fotodehõbi ehitust ja annab tõuke jätkusuutlikule tööstuse arengule.
Tulevikus aitab intelligenta ehituse ja andmete sidumine need tehnoloogiad tõsta veelgi, edendades rohelisemat, madala süsiniku elektriindustrit. Ootame rohkem innovatsioone, et optimiseerida protsesse, vähendada kulutusi ja uuendada globaalist energiakorda.










