
1 Silindriku tüüpi ületusvoolu piiraja
1.1 Silindriku tüüpi SFCL struktuur ja tööpõhimõte
Joonis 1 näitab silindriku tüüpi SFCL ühefaasi elektroonringjoonikaavat, mis koosneb neli diodidest D₁ kuni D₄, DC pingeallikast V_b ja ülejuhtivast spiraal L. Veebikatkija CB on siduselt ühendatud piirajaga, et lõpetada viga pärast selle piiramist. Pingeallikas V_b tohib ülejuhtivale spiraali L biasi voolu i_b. Pinge V_b on seatud piisavalt kõrgeks, et ületada dioodide paaride (D₁ ja D₃ või D₂ ja D₄) edasipära pingelangus, luues biasi voolu i₀. Väärtus i₀ on seatud suuremaks kui liini voolu i_max tipuväärtusest, arvestades ülevaatesituatsioone.
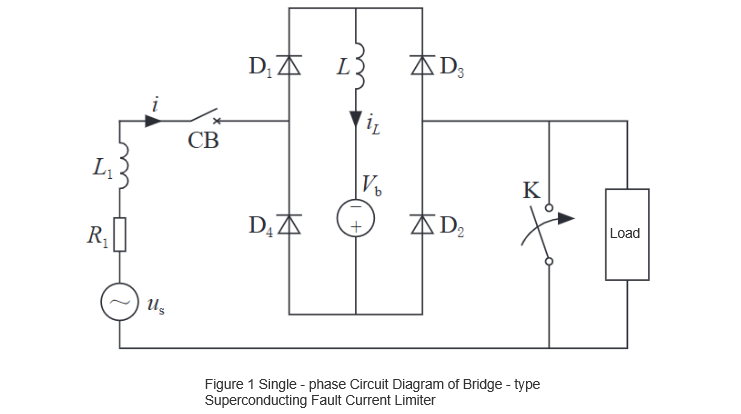
Seega, tavalistes tingimustes jääb dioodide silinder pidevalt läbiühendatuks ja SFCL ei pruugi igasugust takistust liinivoolu i vastu, eirates väikeseid edasipäraseid pingelangusi silindri kohal. Eeldades, et tavalises töös dioodide D₁ kuni D₄ läbivad voolud on vastavalt iD1 kuni iD4, siis liinivool on:

See saadakse Kirchhoffi vooluseaduse (KCL) järgi:
Kui liinil esineb lühikuteen, siis liinivool kiiresti kasvab väärtuseni i₀. Positiivsel ja negatiivsel pooltsükli ajal muutub üks dioodide paari tagantehitatuks ja välja lülitub, seega sisestatakse automaatselt spiraal L ringikorda. Lühikuteen vool piiratakse spiraali induktiivse reaktansiga.
Ülejuhtiva spiraali kriitilise voolu sobiva seatmise korral jääb spiraal vea ajal ülejuhtivasse olekusse, vältides vastuseaja ja külmumise mõjusid. Kuid kui viga jätkub, siis ülejuhtiva induktor läbiv vool jätkuvalt kasvab, lõpuks läheneb stabiilsesse lühikuteen voolu väärtusele, mis eksisteeriks ilma piirajata. Seetõttu tuleb viga ajaliseks vahemikuks veebikatkija abil lõpetada. Lihtsuse huvides eeldatakse, et lühikuteen tekib hetkel, mil allikapinge läbib nulli (t = t₀). Kirchhoffi pingeseaduse (KVL) järgi saame järgmise võrrandi:

Algtingimus I0, lahendades seda diferentsiaalvõrrandit saame:

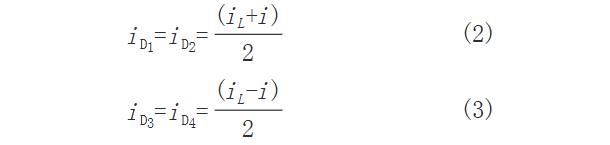
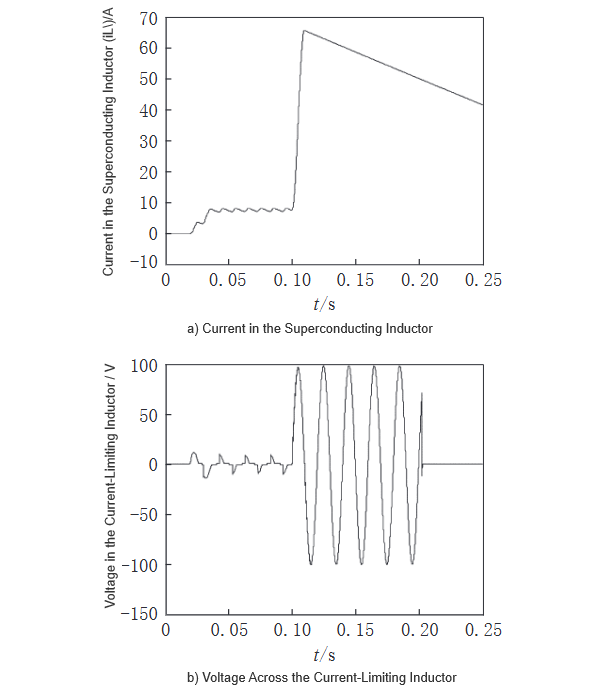
Joonis 2 näitab induktorivoolu ja liinivoolu lainekujusid tavalisel tööl ning pärast viga, kui viga algab hetkel t = 0,1 s. Simulatsioonitulemused näitavad, et lühikuteen vool kasvab aeglaselt ülejuhtiva induktor piiramise tõttu. Piiramisprotsess on põhitõttu ülejuhtiva induktor magnetiseerimine. Kui viga vool stabiliseerub, siis piiraja mitte enam toimib. Seetõttu tuleb viga enne lühikuteen voolu stabiilse väärtuse saavutamist veebikatkija abil lõpetada. Joonisel lõpetab veebikatkija viga hetkel t = 0,2 s.
1.2 Silindriku tüüpi ülejuhtivate veavoolu piirajate struktuuri parandamine
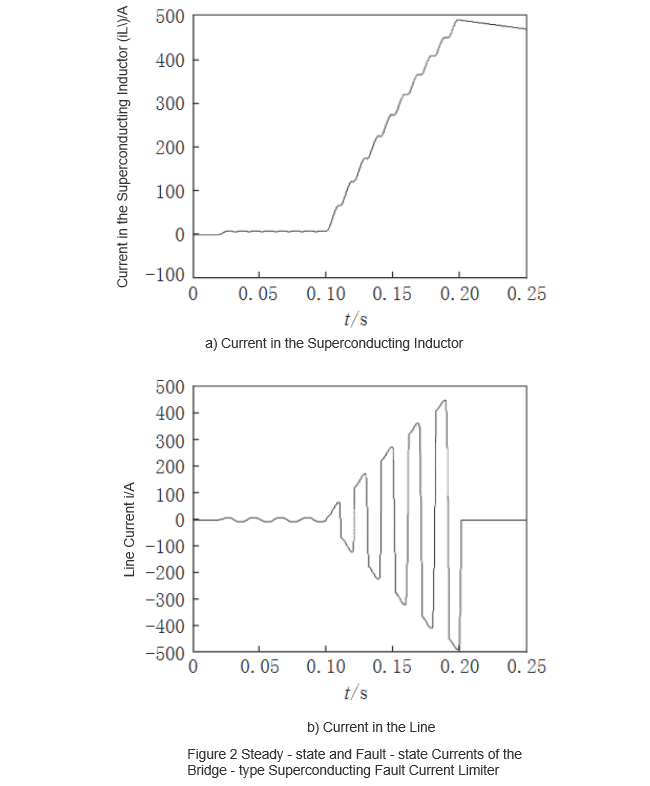
Tavaline silindriku tüüpi ülejuhtiv veavoolu piiraja (SFCL) võib ainult kontrollida lühikuteen voolu kasvamiskiirust, kuid ei ole efektiivne selle stabiilse väärtuse kontrollimisel. Lühikuteen voolu stabiilse väärtuse piiramiseks kombinib hübriid-SFCL ülejuhtivuse omadused ülejuhtivas olekus ja ülejuhtiva materjali kiire pingereaktiivsuse quench'i ajal. See saavutatakse ühendades ohutav ülejuhtiv veavoolu piiraja silindriku tüüpi SFCL-ga. Selle hübriidmeetodi skeemiline joonis on näidatud joonisel 3.
Tavalisel tööl on lüliti K avatud, seega ei pruugi ohutav ülejuhtiv veavoolu piiraja üldist takistust, lubades voolu i_L läbida selle läbi. Viga tekkinud korral esitab ohutav ülejuhtiv veavoolu piiraja kohe kõrge takistuse ja töötab ühiselt ülejuhtiva induktoriga, piirates viga voolu. Pärast vigade lõpetamist sulgeb lüliti K; sel hetkel, oma kõrge takistuse tõttu, ohutav ülejuhtiv veavoolu piiraja lühendatakse ja kiiresti taastub ülejuhtivusesse olekusse.
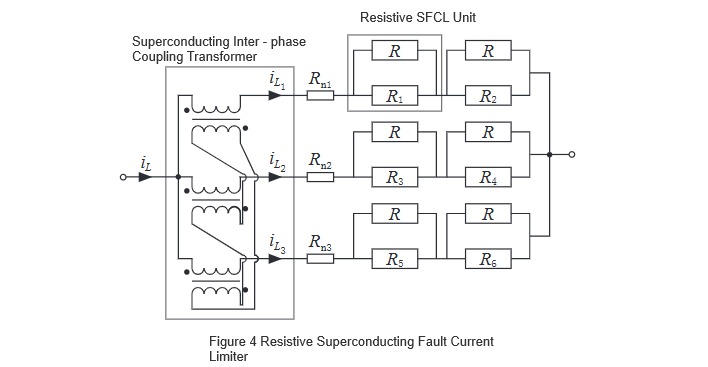
Kuna lüliti K-l on lülituspinge, see lühendatakse taastunud ohutava ülejuhtiva veavoolu piiraja poolt, mis muudab terve hübriid silindriku tüüpi limiter vähetakistuslikuks. Sel hetkel, lüliti K avamine lõpetab terve veavoolu piiramise protsessi. Ohutava ülejuhtiva veavoolu piiraja võimekuse suurendamiseks kasutatakse tavaliselt ohutavate ülejuhtiva veavoolu piiraja ühikute rida- ja paralleelsed ühendused, et parandada seadme pingeväärtust ja vooluväärtust. Joonis 4 näitab ohutava ülejuhtiva veavoolu piiraja elektroonringjoonikaavat, kus R₁ kuni R₆ tähistavad ülejuhtivaid vastupeid, ja R on ümberühendusvastus, mis võib panna kahte sama sarivee ülejuhtivat materjali samal ajal quench'i olekusse.
Vahendi fasega koppeltransformaator roll on tagada, et iL1 = iL2 = iL3, nii et erinevate paralleelsete sirgede SFCL ühikud võivad samaaegselt quench'ida pärast lühikuteen tekkimist. Hübriid silindriku tüüpi SFCL piirab efektiivselt lühikuteen voolu stabiilse väärtuse, kasutades ülejuhtiva materjali omadusi ülejuhtivusest normaalse olekuni (S/N), automaatselt aktiveerides veavoolu piirava vastu, kui viga tuvastatakse, ilma lisaviga tuvastamise mehhanismideta. Kuid ohutava ülejuhtiva veavoolu piiraja lisamine suurendab üldist töödeldamiskulusid ja pikendab quench'i taastumisaega, keerulisemaks muutes süsteemi uuesti lülitamise koordineerimise.
2 Mitteülejuhtiv silindriku tüüpi veavoolu piiraja
2.1 Kiipüks veavoolu piiraja
Viimastel aastatel on elektritehnika kiire areng ja suure kapasiteediga elektronkomponentide laialdasem kasutamine, nagu SCR, GTO, GTR ja IGBT, tekitanud huvi veavoolu piirajate uurimise vastu, mis koosnevad induktoreid, vastupeid, kondensaatoreid ja elektronkomponente. Mitteülejuhtiv silindriku tüüpi veavoolu piiraja koosneb tavalistest komponentidest, vältides keerulist ülejuhtivtehnoloogiat, ja pakub eeliseid kõrge usaldusväärsuse ja hea kulusuhetega.
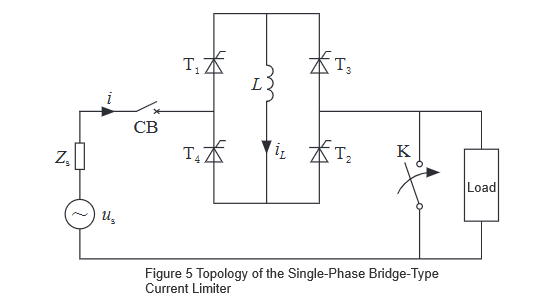
Joonis 5 näitab ideaalse ühefaasi silindriku tüüpi veavoolu piiraja skeemilist joonist, mis koosneb ühefaasisest silindrikust ringjoonest ja veavoolu piirava induktorist L. Tavalisel tööl rakendatakse neljale tiristorigele pidevalt käsklusi. Pärast lühikest magnetiseerimisperioodi jõuab induktorisse vool liini voolu tipuväärtuseni. Kui eiratakse tiristorite T₁ kuni T₄ pingelangust, ei pruugi piiraja üldist takistust.
Kui lühikuteen tekib pinge allika positiivses pooltsükli ajal, siis sunditakse T₃ välja lülituma, sisestades veavoolu piirava induktori ringikorda, piirates viga voolu. Induktori L väärtuse õigeks seatmisega saab lühikuteen voolu piirata mis tahes soovitud tasemeni. Lisaks on see piiraja võimeline lühikuteen voolu kohe lõpetama. Kuid neli juhtimat avaldab komplekstile kontrollilogika, mis on lühikuteen voolu kohe lõpetamiseks suhteliselt keeruline. Veavoolu piiramise ajal tekivad olulised harmonikad; need saavad tõhusalt vähendada, ühendades paralleelsed ümberühendusinduktorid silindriku sirgete kõrvale.
2.2 Pooljuhitav silindriku lühikuteen veavoolu piiraja
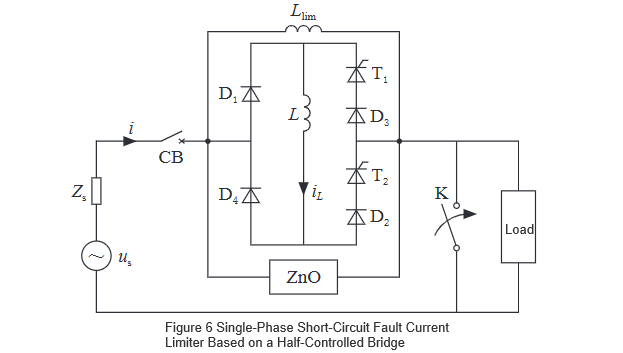
Joonis 6 näitab ühefaasilise lühikuteen veavoolu piiraja topoloogiat, mis põhineb pooljuhitaval silindrikul ja endast välja lülituvatel seadmetel. See süsteem koosneb diodidest D₁ kuni D₄, endast välja lülituvatest seadmetest T₁ ja T₂, ülejuhtivast induktorist L, veavoolu piirava induktorist Llim ja ZnO ülepingeabsorbeerijast, kus us tähistab AC pingeallikat ja CB on liini veebikatkija.
Tavalisel tööl on kaks endast välja lülituvat seadet T₁ ja T₂ pidevalt käsklustele. Alustades energiaga, kasvab ülejuhtiva induktorisse vool allikapinge mõjust liini voolu tipuväärtuseni. Kui töökindlus stabiliseerub, jääb iL püsivaks. Eirates diodide D₁ kuni D₄ ja endast välja lülituvate seadmete T₁ ja T₂ edasipäraseid pingelanguid, on silindriku pingeline 0 ja veavoolu piirava induktor Llim pingeline on ka 0. Seetõttu ei pruugi piiraja üldist takistust ja ei mõjuta seda süsteemi.
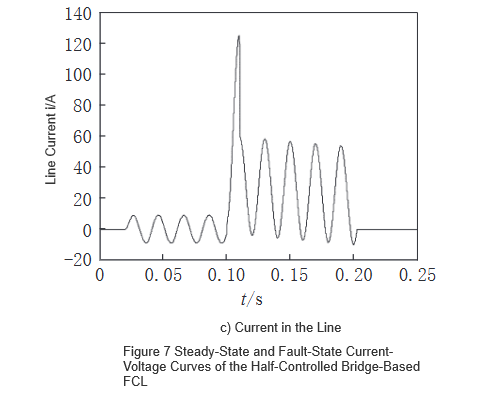
Kui süsteemis esineb lühikuteen, siis ülejuhtiva induktorisse vool iL kasvab. Pärast lühikuteen tuvastamist lülitatakse välja T₁ ja T₂, lõpetades silindriku töö. Lühikuteen vool siis ühendatakse ümberühendusveavoolu piirava induktoriga Llim, samas kui ülejuhtiva induktorisse vool jätkab diodide D₁ ja D₄ läbimist, kuni see langub nulli. Joonis 7 näitab ühefaasilise lühikuteen veavoolu piiraja pooljuhitava silindriku põhjal stabiilse ja vigaolukorra voolu ja pingekuju.
Süsteem alustab tööd hetkel t=0,02 sekundit ja jõuab ühe tsükli jooksul stabiilse olekuni. Lühikuteen tekib hetkel t=0,1 sekundit, ja T₁ lülitatakse välja vea tuvastamise peale ühe pooltsükli jooksul. Simulatsiooni jaoks kasutati järgmisi ringjoone parameetreid: pingeallika fazepeakpinge on 100V/50Hz; nominaliseeritud töökindluse peakvool on 10A; töökindluse vastus on 10Ω; ülejuhtiva DC induktor L on 10mH; diodide ja juhtimate edasipärase pingelangus on 0,8V; ja veavoolu piirava induktor Llim on 10mH.
Üks peamisi eesmärke, miks ülejuhtivaid veavoolu piirajaid (SFCL) kasutatakse elektrivõrkudes, on lühikuteen voolude piiramiseks, et need ei ületaks liini veebikatkija kohe lõpetamise kapasitetti. Analüüsi käigus kasutatakse tavaliselt lühikuteen voolu vähendamise suhet D (0<D<1) lühikuteen voolu tipuväärtuse protsendivähendamise tähistamiseks, ja D avaldis on:

on lühikuteen voolu tipuväärtus ilma SFCL-ta, ja selle väärtus on seotud süsteemi ekvivalent X/R suhtega.

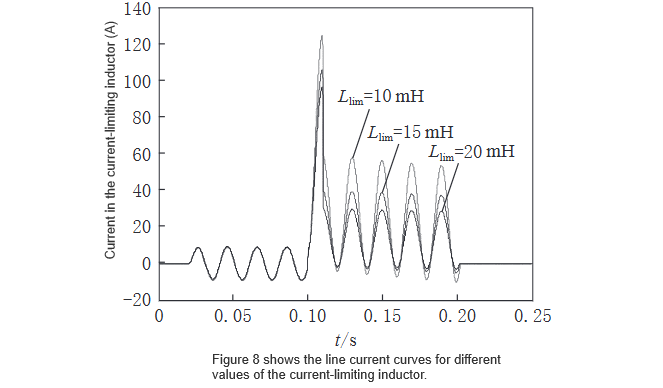
Võrrandis (7) Ip tähistab lühikuteen voolu perioodse komponendi amplituudi, ja Ta on aegkonstant. ilim tähistab piiratud lühikuteen voolu tipuväärtust, mis sõltub veavoolu piirava induktor Llim suurusest. Valides sobiva Llim väärtuse, saab saavutada soovitud lühikuteen voolu tipuväärtuse protsentuaalset vähendust. Simulatsioonid viidi läbi Llim väärtustega 10 mH, 15 mH ja 20 mH, ja tulemused on näidatud joonisel 8. On näha, et suurem Llim annab paremat veavoolu piiramist, kuid ka suurendab töödeldamiskulusid.
2.3 Pooljuhitava silindriku lühikuteen veavoolu piiraja parandamine
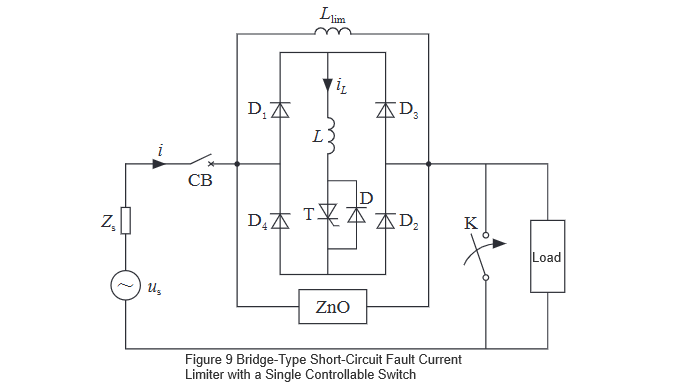
Konfiguratsioonis, mis on näidatud joonisel 6, on T₁ ja T₂ pidevalt käsklustele tavalisel tööl. Kui lühikuteen tuvastatakse, lülitab kontrollitsüklus välja nii T₁ kui ka T₂. Asendades T₁ ja T₂ ühe juhtima T silindriku ühise tee kaudu, saavutatakse sama veavoolu piiramise tõhusus. See muudatus vähendab juhtimise komponentide arvu, alandab kulusid ja lihtsustab ringjoone keerukust. Skeemiline joonis on näidatud joonisel 9.
3 Kokkuvõte
See artikkel tutvustab mitut silindriku tüüpi lühikuteen veavoolu piirajat. Kombinerides tavalist ülejuhtivat silindriku tüüpi veavoolu piirajat ohutava ülejuhtiva veavoolu piirajaga, saab efektiivselt piirata










