Այս հոդվածը լրացնում է այդ բաց տեղը, ներկայացնելով ընդհանուր գաղափարը ընդհանուր դիրքային MLC-երի մասին, որոնց տոպոլոգիական էվոլյուցիան, հատկությունները, տոպոլոգիաների համեմատությունը, մոդուլացիայի տեխնիկան, կառավարման վերջին և նրանց արդյունաբերական կիրառությունները ներկայացնում են։ Ավելնորեն, ներկայացվում են ապագայի դիրքերը և առաջարկությունները, որպեսզի հետազոտողներն ու ճարտարագետները ավելի լավ կարողանան հասկանալ այդ կոնվերտերների պոտենցիալ կիրառությունները և առավելությունները։
1.Ներածություն:
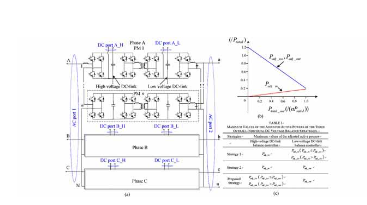
Ընդհանուր դիրքային MLC-երի գլխավոր էվոլյուցիայի դիրքերը հաշվի առնելով, գոյություն ունեցող MLC տոպոլոգիաները կարող են դասակարգվել մի քանի ընտանիքների մեջ, ինչպես ցուցադրված է հետևյալ նկարում։ Առաջին ընտանիքը ներառում է CHB-հիմնական տոպոլոգիաները և ունի բարձր մոդուլային կառուցվածք և օպտիմալ քանակով ուժային սահմանափակիչներ դուրս եկած մակարդակների համար [31]։ Այնուամենայնիվ, անհրաժեշտ են բազմաթիվ անկախ ԴՍ աղբյուրներ, որը պահանջում է ծավալուն անկախ փոխանցիչների օգտագործում կամ սահմանափակում է դրանց կիրառությունը մի քանի անկախ ԴՍ աղբյուրներ ունեցող կիրառություններում։ Ավելին, կասկածել է կարողանալու դիրքային հոսանքի անհավասար բաշխումը կասկածված ուժային բջիջների միջև այս ընտանիքում։ Երկրորդ ընտանիքը ներառում է NPC-հիմնական տոպոլոգիաները, ինչպիսիք են 3L-NPC և 3L-T2C կոնվերտերները։ Այս կոնվերտերները բնութագրվում են ուժային շղթաներով և հեշտ պաշտպանությամբ։ Այնուամենայնիվ, դիրքային հավասարակշռումը անհրաժեշտ պահանջ է այս տոպոլոգիաների կառավարման նախագծման մեջ։ FC-հիմնական տոպոլոգիաները օգտագործում են կոնդենսատորներ որպես սահմանափակիչ բաղադրիչներ մակարդակների քանակը մեծացնելու համար, ձևավորելով մի MLC ընտանիք, որը բնութագրվում է բարձր սեղմողականությամբ, բարձր կրկնողությամբ և կողմնակից գործողությամբ։ Հիբրիդ MLC-երը ձևավորվում են սովորական տոպոլոգիաների հիմնական բջիջներով և, հետևաբար, համադրում են դասական MLC-երի մի քանի առավելությունները բարձր մակարդակների արտադրման հնարավորությամբ։ MMC տոպոլոգիաները կազմում են մի MLC ընտանիք, որը ներկայացնում է բարձր լարման կիրառությունների համար հասանելիության առաջընթաց իր բարձր էֆեկտիվության և բարձր մոդուլային կառուցվածքի պատճառով։

2. Ծանր դիրքային տոպոլոգիաներ:
Երեք մակարդակային ակտիվ NPC (ANPC) կառուցվածքը կարող է լուծել ուժային կորուստների բաշխման հարցը՝ օգտագործելով երկու տարբեր մոդուլացիայի տեխնիկան, որոնց անվանում են մոդուլացիայի պատրոն I և II։ Այս պատրոններում երկու սահմանափակիչ դիոդները փոխարինվում են երկու ակտիվ սահմանափակիչներով, որպեսզի կառավարեն հոսանքի հորիզոնական ուղղությունը զրո վիճակներում։ Մոդուլացիայի պատրոն I առաջացնում է ամենաշատ սահմանափակիչ կորուստներ յուրաքանչյուր սունգի արտաքին սահմանափակիչներում, մինչդեռ պատրոն II տեղափոխում է սահմանափակիչ կորուստները ներքին սահմանափակիչներում։ FC կատեգորիան ներառում է այն տոպոլոգիաները, որոնք օգտագործում են FC-ներ անկապակց ներաutral կետով և, հետևաբար, չեն բերում դիրքային հավասարակշռման հարցը։ Այս տոպոլոգիաներում օգտագործվող դիրքային աղբյուրները փոխարինվում են դիրքային կոնդենսատորներով, որոնց օգնությամբ ստեղծվում են դուրս եկած լարումները։ Ընդհանուր առմամբ, շնորհիվ մոդուլային կառուցվածքի, այս ընտանիքը ունի հնարավորություն ստեղծել հարաբերականորեն բարձր մակարդակներ համեմատած NPC ընտանիքի հետ։ Ավելին, սեղմողականությունը, կողմնակից գործողությունը և սահմանափակիչների միջև կորուստների բաշխման բարելավումը այս տոպոլոգիաների հիմնական հատկություններն են։ Հիբրիդ բազմամակարդակային կոնվերտերները (HMLC) համադրում են մի քանի հիմնական տոպոլոգիաներ նրանց համապատասխան առավելությունների օգտագործման համար, նույն ժամանակ կատարում են դրանց սահմանափակումները։ Ներկայացված հիբրիդ տոպոլոգիաները կարող են բարելավել դիրքային և դիրքային կոնդենսատորների լարման հավասարակշռման հնարավորությունները և սահմանափակիչների միջև կորուստների բաշխումը, նույն ժամանակ նվազեցնելով անհրաժեշտ ակտիվ և անակտիվ կոմպոնենտների քանակը համեմատած NPC և FC տոպոլոգիաների հետ։

3. Մոդուլացիա և կառավարում:
Բազմամակարդակային կոնվերտերների հիմնական կառավարման տեխնիկան դասակարգված է ներկայացված նկարում։ Ինչպես երկու մակարդակային կոնվերտերի դեպքում, կասկածված կառավարման կառուցվածքը սովորաբար բաղկացած է արտաքին և ներքին կառավարման փուլերից մոդուլատոր բլոկի հետ։ Չնայած ներքին և արտաքին ցիկլերը նման են երկու մակարդակային և բազմամակարդակային կոնվերտերներում, մոդուլատոր փուլը, որը գլխավորապես անհրաժեշտ է սկալյար և դաշտային ուղղության կառավարման (FOC) տեխնիկան համար, պետք է կարգավորվի մակարդակների քանակը բարձրանալու հետ միասին։ Այս բաժնում առաջինը ներկայացվում է ամենա pupular և առաջարկվող մոդուլատորների կարգավորումը։ Ավելին, ավելի մանրամասն հետազոտվելու են այն կառավարման տեխնիկան, որոնք չպահանջում են առանձին մոդուլատոր։

4. Արտադրական կիրառություններ:
Պատմականորեն, CHB ինվերտորները բնութագրվում են իրենց մոդուլային կառուցվածքով, կողմնակից գործողությամբ և բազմաթիվ լարման մակարդակներ ստեղծելու հնարավորությամբ բջիջների կասկածման միջոցով։ Այնուամենայնիվ, բազմաթիվ անկախ ԴՍ աղբյուրների (ռեկտիֆիկատոր+փոխանցիչ արտադրական դիրքի կետից) պահանջը սահմանափակում է դրանց կիրառությունը շատ լայն հզորության տիրույթում։ Իրոք, CHB ինվերտորները գլխավորապես կիրառվում են բարձր հզորության կիրառություններում (հարյուրավոր կիլովատներից միլիոն վատտների տիրույթում), որտեղ չկան այդ համար հասանելի կոմպոնենտներ։ Այլ կողմից, սովորական դիրքային տոպոլոգիաները բնութագրվում են մեկ դիրքային աղբյուրով, որը դարձնում է դրանք լավ ալտերնատիվ տարբեր կիրառություններում, ինչպիսիք են եռափուլ արտադրական համակարգերը։ Իրոք, դրանք կարող են կիրառվել շատ կոնֆիգուրացիաներում, ինչպիսիք են 3-սունգ 3-գոյն, 3-սունգ 4-գոյն և 4-սունգ 4-գոյն մոտոր դրայներում, PV ինվերտորներում, արագ դիրքային լարման լուցնիչներում և այլն։

Աղբյուրը: IEE-Business Xplore
Հայտարարություն: Հարմար է ներկայացնել սկզբնական լավ հոդվածները, եթե կա իրավունքի խախտում, խնդրում ենք կապվել և ջնջել։