Արտաքին վակուումային սարքերը (առաջինը սարքեր անվանելով) լայնորեն օգտագործվում են բաշխման ցանցում դրանց առավելությունների պատճառով, ինչպես փոքր չափերը, թեթև կշիռը, կրակային և հայտարարական ապահովությունը, հարթ աշխատանքը, ցածր ձայնային մակարդակը, փոքր բաց կոնտակտի տարածությունը, կարճ աղանդի ժամանակը և հեշտ սպասարկումը։ Որպեսզի գլուխ առ գլուխ դարձնեն բարձրացող ատմոսֆերայի սուրացմանը, ծանր թաթի, փոքր հումունքի, կոնդենսացիայի կամ սառույցի կորցման անհաստատուն ամբիոնների պայմաններում սարքի սյունակի մակերևույթում կարող է տեղի ունենալ մասնակի առանձնացում (PD), որը ուղղակիորեն կարող է հանգեցնել լուսային արագացումների և կրճատել սարքերի ծառայության ժամկետը, ազդելով էլեկտրաէներգետական համակարգի անվտանգ և կայուն աշխատանքի վրա։
Այս հոդվածում ZW32-12 արտաքին սյունակային բարձր լարման վակուումային սարքը (այստեղից հետո անվանելով HV ZW32-12 սարք) օրինակ է հանդիսանում, որը փորձարկվում է տարբեր դաշտային պայմաններում։ ZW32-12 սարքի սյունակի մակերևույթի առանձնացման գործընթացը գրանցվում է UV պատկերիչով, իսկ նույն ժամանակ չափվում է առանձնացման քանակը։ Այնուհետև, հետ գալով պատկերի մշակման հետ հաջորդաբար ստացվում են պատկերի բնորոշական պարամետրերը, որոնք նկարագրում են այդ պատկերների հատկությունները։ Հետո, օգտագործելով ամենաքիչ քառակուսիների մեթոդը առանձնացման քանակը հաշվարկվում է, որը lehetővé teszi az UV képek kalibrálását. Ez egy új, érintés nélküli detektálási technika a váltók részleges visszapattanásának felmérésére.
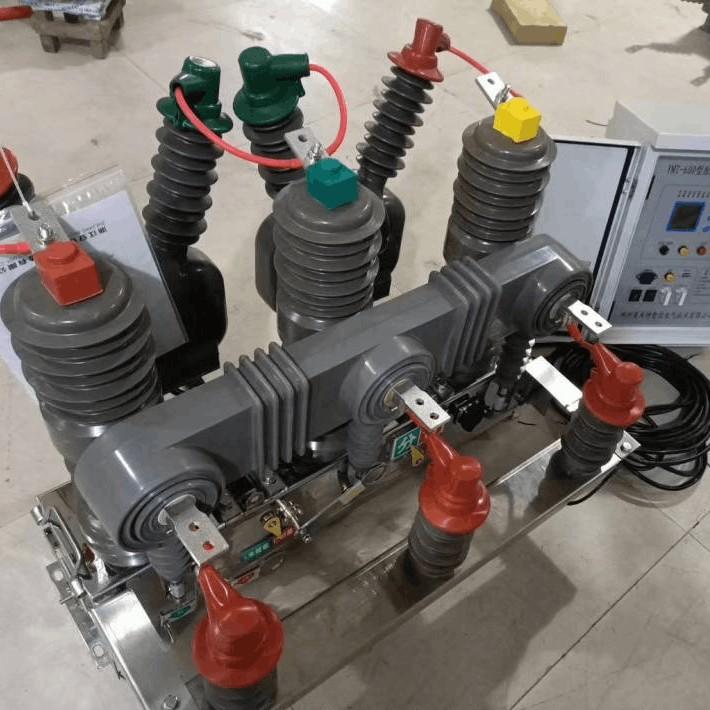
ZW32-12 սարքը երեք փուլային, 50Hz, 12kV AC արտաքին էլեկտրաէներգետական բաշխման սարք է։ Այն հիմնականում օգտագործվում է բեռնային հոսանքի, գերբեռնային հոսանքի և կորուստի հոսանքի հատումը և փակումը։ Այն կառուցվածքը ցուցադրված է նկար 1-ում։

Սյունակի մակերևույթի առանձնացման պատկերի և մասնակի առանձնացման (PD) քանակի միաժամանակ գրանցման համար նախագծված է սյունակի մակերևույթի առանձնացման փորձարկման համակարգ, ինչպես ցուցադրված է նկար 2-ում։ Նկար 2-ում T-ն նշանակում է լարման կարգավորիչը, B-ն լարման բարձրացուցիչը, R₁-ը սահմանափակ դիմադրությունը, իսկ C₂-ն կոնտուրային կապը, որը օգտագործվում է PD չափման համար։

Համակարգում օգտագործվող բարձրացուցիչը YDWT-10kVA/100kV մոդելն է, ինչպես ցուցադրված է նկար 3-a-ում։ Այն օգտագործվում է սյունակի համար անհրաժեշտ բարձր լարման ստեղծման համար։
OFIL Superb UV պատկերիչը օգտագործվում է սյունակի մակերևույթի առանձնացման UV պատկերներ ստանալու համար, ինչպես ցուցադրված է նկար 3-b-ում։ Փորձարկման օրինակը երեկույթի սյունակն է ZW32-12 սարքից, որը արդեն երեք տարի է օգտագործվում, ինչպես ցուցադրված է նկար 3-c-ում։ Օրինակը տեղադրվում է արդարացված ամբիոնային պարկում, որտեղ հարաբերական 습기도ն կարող է կայուն կառավարվել։
Այս համակարգում մասնակի առանձնացման (PD) քանակը չափելու համար օգտագործվում է իմպուլսային հոսանքի մեթոդը։ Կոնսոլը կառավարում է լարման կարգավորիչը և բարձրացուցիչը անհրաժեշտ լարման ստեղծման համար։ Այնուհետև, PD ազդանշանը փոխանցվում է JFD-3 PD ազդանշանային սարքին կոնտուրային կապի և ազդանշանային իմպեդանսի միջոցով։
Ամբիոնային պարկում հարաբերական 습기ությունը կարող է կայուն մակարդակում պահպանվել պարբերական ամպային կառավարման միջոցով։ Սյունակները երկու ժամ են նախատեսված լարման ենթարկված, որպեսզի լիովին կամայացած լինեն։ Ապա սյունակին կիրառվում է 12kV լարում 5 րոպեյի ընթացքում, որի ընթացքում գրանցվում են UV պատկերները և չափվում է PD քանակը։ UV պատկերիչի հեռավորությունը 5 մետր է, անկյունը 0°, իսկ գեն 110%։ Յուրաքանչյուր հարաբերական 습իտության մակարդակի համար կրկնվող փորձեր են կատարվում, որոնք տարածվում են 70%-ից 90%-ի միջև 5%-ի քայլով։
UV պատկերիչը գրանցում է տեսանյութ, հետևաբար պետք է հաջորդաբար պատկերների համար տեսանյութի պրոցեսավորում կատարել հետագա վերլուծության համար։ Յուրաքանչյուր պատկերի համար է իրական գույնի RGB պատկեր [3]։ Սյունակի մակերևույթի առանձնացումը արտահայտվում է UV պատկերում որպես լուսային կետ։ Մակերևույթի առանձնացման ինտենսիվությունը ավելի բարձր է, այնպես էլ ավելի մեծ կետի մակերես։ Այսպիսով, պատկերի նախապատրաստումը և պատկերի կտրումը անհրաժեշտ են պատկերի հետևի և կետի մասի հետևի հեռացման համար։

Քանի որ RGB գույնական տարածության մեջ կարմիր կոմպոնենտը (R), կանաչ կոմպոնենտը (G) և երկարման կոմպոնենտը (B) միայն ցուցադրում են կարմիր, կանաչ և երկարման գույների հարաբերությունը և չեն կարող ներկայացնել պատկերի լուսայինությունը, մենք յուրաքանչյուր պատկերի համար HSL գույնական տարածությունում անալիզ ենք կատարում։ HSL-ն նշանակում է Գույն, Ամբողջականություն և Լուսայինություն համապատասխանաբար։ Պատկերի համար HSL կոմպոնենտները ցուցադրված են նկար 4-ում։ Նկար 4-ից կարող ենք հասկանալ, որ H կամ S կոմպոնենտը չի կարող տարբերել կետը հետևից, իսկ L կոմպոնենտը կարող է կատարել այս տարբերակումը [4]։

Նկար 4-c-ից կարող ենք տեսնել, որ կետի մասի L կոմպոնենտը ավելի մեծ է հետևի L կոմպոնենտից։ Այսպիսով, սեփական կոմպոնենտի սեփական հատուկ մեթոդը անմիջապես կարող է օգնել կետի մասը դուրս բերել։ Այս մեթոդի հիմնական է համապատասխան լուսայինության սեփական սահմանափակումը ընտրել։ Այստեղ մենք Otsu-ի սեփական սահմանափակումի մեթոդը օգտագործում ենք L կոմպոնենտի սեփական սահմանափակումը հաշվարկելու համար [5]։ Այն հետ գալով, որ Matlab կոդավորումը իրականացվել է Otsu-ի մեթոդի համար, որոշվել է որ լավագույն L կոմպոնենտի սեփական սահմանափակումը 216 է, և սեփական արդյունքը ցուցադրված է նկար 5-c-ում։ Ինչպես երևում է, հետևը հեռացված է և միայն UV կետի մասը մնացել է։
Նկար 5-c-ում ցուցադրված է, որ բացի այդ կետի մասից դեռ կան շատ փոքր հույն կետեր։ Այս հարցի լուծման համար մենք օգտագործում ենք մաթեմատիկական մորֆոլոգիական գործողություններ շրջանաձև կառուցվածքային էլեմենտով 4 պիկսել շառավիղով հույն կետերը հեռացնելու համար [6]։ Մաթեմատիկական մորֆոլոգիական պրոցեսի հետ գալով արդյունքը ցուցադրված է նկար 5-d-ում։ Բոլոր հույն կետերը հեռացված են, և միայն կետի մասը մնացել է։ Մենք սահմանում ենք կետի մասում պիկսելների քանակը որպես այդ UV պատկերի «լուսային մակերեսը»։


UV տեսանյութի հաջորդաբար պատկերների լուսային մակերեսը հաշվարկելուց հետո կարող ենք ստանալ լուսային մակերեսի կորը։ 85%-ի համար լուսային մակերեսի կորը ցուցադրված է նկար 6-ում։ Նկար 6-ից կարող ենք տեսնել, որ լուսային մակերեսը փոքր տիրույթում տարբերվում է, հանդիպելով երբեմն մեծ կետ։ Այսպիսով, երեք պարամետրեր են սահմանված առանձնացման ինտենսիվությունը նկարագրելու համար. միջին լուսային մակերեսը, միջակայքային լուսային մակերեսը և միջակայքային լուսային մակերեսի կրկնությունների քանակը համապատասխանաբար [7]։ Մենք ընտրում ենք 100 հաջորդաբար պատկերներ մասնակի առանձնացման հետ հաջորդաբար որպես ուսումնասիրման օբյեկտներ։ Միջին լուսային մակերեսը 100 պատկերների լուսային մակերեսների միջինն է։ Միջակայքային լուսային մակերեսը այն լուսային մակերեսների միջինն է, որոնք մեծ են միջին լուսային մակերեսից, իսկ միջակայքային լուսային մակերեսի կրկնությունների քանակը այն լուսային մակերեսների քանակն է, որոնք մեծ են միջին լուսային մակերեսից։ Նկար 6-ից հասկանում ենք, որ միջին լուսային մակերեսը 665 պիկսել է, միջակայքային լուսային մակերեսը 902 պիկսել է, իսկ միջակայքային լուսային մակերեսի կրկնությունների քանակը 32 է։
Երբ հաշվարկվում են երեք բնորոշական պարամետրերը և մասնակի առանձնացման (PD) քանակը համաժամանակ չափվում է, մենք փորձում ենք օգտագործել այս երեք UV պատկերի պարամետրերը մասնակի առանձնացման քանակը որոշելու համար ամենաքիչ քառակուսիների հաջորդական վեկտորային մեքենայի մեթոդի միջոցով։

Ընտրված են 90 հատ UV տեսանյութներ։ Այս նմուշների յուրաքանչյուր պատկերի համար հաշվարկվում են երեք UV պատկերի պարամետրերը, իսկ համապատասխան մասնակի առանձնացման (PD) քանակը գրանցվում է JFD3 PD ազդանշանային սարքով։ Վեկտորային մեքենայի մուտքային արգումենտները ընտրվում են որպես միջին լուսային մակերեսը, միջակայքային լուսային մակերեսը, միջակայքային լուսային մակերեսի կրկնությունների